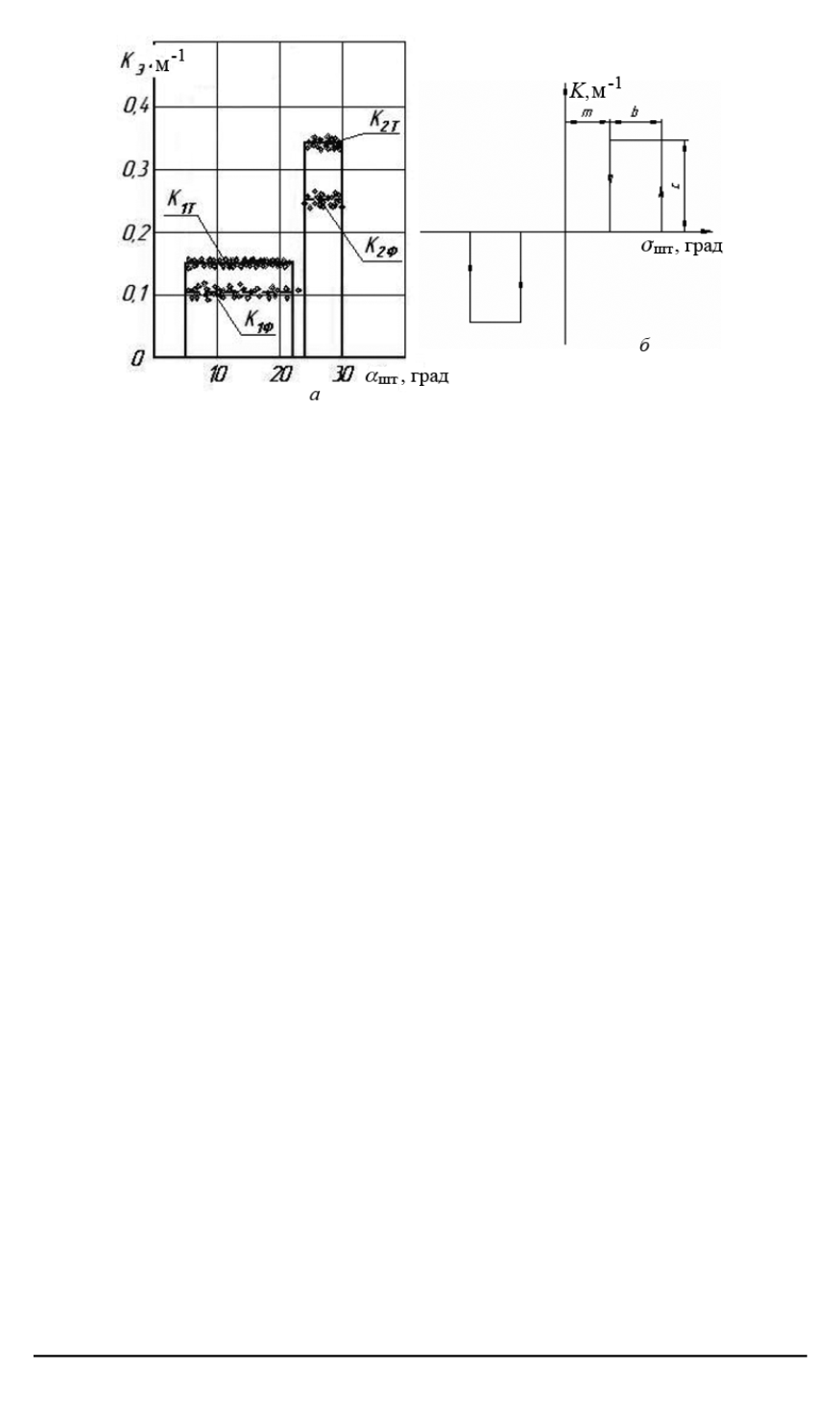
Рис. 10. Зависимость заданной кривизны поворота гусеничной машины от угла
положения штурвала (
а
) и нелинейной характеристики (
б
):
* — фактические значения
увеличением номера передачи и подачи топлива (частоты вращения
вала двигателя) возрастает.
Экспериментальные исследования показывают, что при положе-
нии
α
шт
в зоне нечувствительности характеристики СУП (
α
шт
<
5
◦
),
когда выключается блокировочный фрикционный элемент механизма
поворота, а тормоз поворота еще не включен, траектория зависит от
условий движения. При незначительном сопротивлении дороги с по-
крытием траектория является прямолинейной. В других условиях, при
действии продольных сил, формируемых макропрофилем дороги или
ускорением
˙
V
, наблюдаются самопроизвольное отклонение траекто-
рии движения машины от прямолинейной, в том числе и в сторону,
противоположную повороту штурвала. При движении с большой ско-
ростью режим, при котором происходит поворот со второй расчетной
кривизной
k
2
(
k
2
=
B
−
1
)
, не используется по условию предотвраще-
ния бокового заноса.
При симметричном гармоническом управляющем воздействии
α
шт
=
A
sin(
ωt
)
реакцией системы управления
k
з
(
α
шт
)
является дис-
кретная периодическая импульсная функция. Если рассматривать до-
рожную кривизну как случайную величину, то управляющая функция
является случайной импульсной функцией со случайной протяженно-
стью импульсов и случайными интервалами между ними по пути
S
.
Рассматривая дорожную кривизну
k
д
(
S
)
как вход системы управле-
ния, даже без учета динамических свойств водителя можно сказать,
что она осуществляет нелинейное преобразование дорожной кривиз-
ны в управляющую функцию
k
з
, принимающую два дискретных зна-
чения: 0 или
k
1
, т.е.
k
з
=
φ
(
k
д
(
S
)) =
0
,
|
k
1
|
.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 2 89


