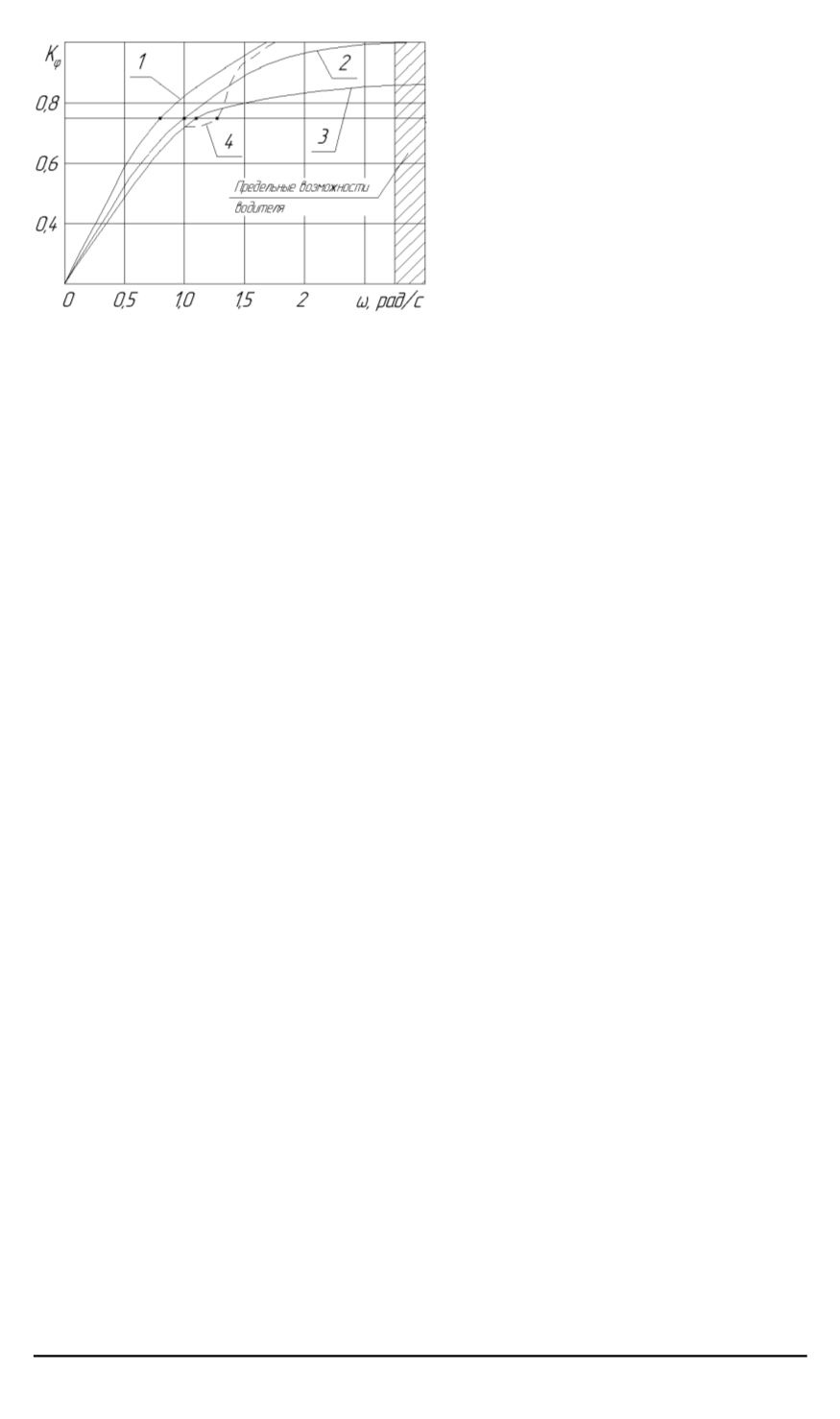
Рис. 11. Зависимость коэффициента фа-
зовой напряженности реакции машины
от частоты управляющего воздействия:
1
— удельная мощность 12,8 кВт/т, дискрет-
ная СУП;
2
— удельная мощность 17 кВт/т,
дискретная СУП;
3
— удельная мощность
17 кВт/т, непрерывная СУП;
4
— то же, что
и
3
при проявлении нелинейности СУП в
виде зон насыщения по давлению
машины (до 17 кВт/т, кривая
2
) возрастает предельная ча-
стота процесса
ω
пр
= 1
рад/с,
при которой
k
ϕ
(
ω
) = 0
,
75
со-
ответственно и прогнозируемая
скорость движения на тестовой
змейке. Эти данные согласуют-
ся с результатами эксперимен-
тальных исследований. Для ма-
шин с непрерывными свойства-
ми СУП (кривая
3
)
ω
пр
= 1
,
1
, а
расчетные значения скорости го-
раздо больше предыдущих зна-
чений и существенно превыша-
ют экспериментальные значения
(в таблице отмечены знаком ),
которое отличается от предыду-
щих на 8. . . 12%. Следовательно
при прогнозировании подвиж-
ности машин, оснащенных гидрообъемными механизмами поворота,
необходимо учитывать ограничение скорости по тяговым возможно-
стям.
Подвижность машин с различными СУП существенно различается
при движении по дороге с сухим малодеформируемым основанием и
со случайной функцией изменения кривизны траектории. Для машин
с дискретными свойствами СУП цикличность включения механизма
поворота достигает 96 на километр пути,
ω
пр
= 5
рад/с, а средняя ско-
рость, ограниченная предельными возможностями водителя по ком-
пенсации быстрых отклонений, не превышает 35,8 км/ч.
На высоких передачах установившегося криволинейного движения
не наблюдается, каждый поворот машина проходит за несколько пе-
риодических включений расчетной кривизны. Это обеспечивает дви-
жение по траектории, близкой к требуемой. Для движения по дороге
с допустимым отклонением от заданной траектории водитель должен
создавать не только упреждающее управление, но и компенсировать
отклонения, которые реализуются с запаздыванием. Чтобы обеспечить
движение машины по требуемой траектории, водитель вынужден осу-
ществлять управление по сложному закону периодическим включе-
нием и выключением механизма поворота. Для вывода машины из
неустановившегося криволинейного движения необходимо не только
“сбросить” управляющее воздействие, но и приложить поворачиваю-
щий момент противоположного знака. В результате машина из пово-
рота выходит, но это состояние не фиксируется, а начинается поворот
92 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 2


