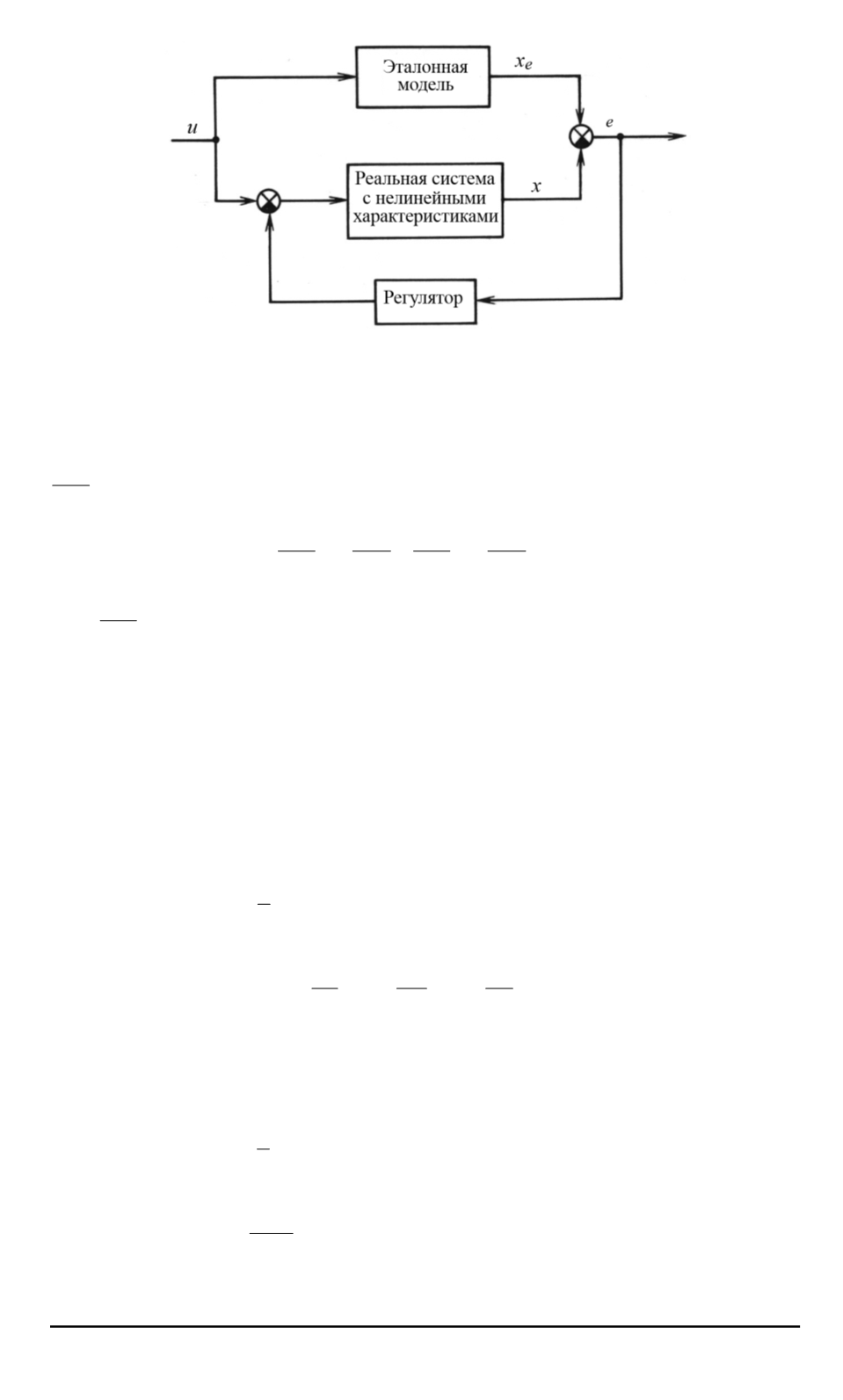
Рис. 7. Структурная схема нелинейного ЭГСП с эталонной моделью и регуля-
тором
исследуемой системы необходимо, чтобы выполнялось неравенство
dV
1
dt
<
0
, причем
dV
1
dt
=
∂e
1
∂x
1
∙
dx
1
dt
=
∂e
1
∂x
1
∙
e
1
,
где
dx
1
dt
=
f
(
e
1
)
,
˙
V
1
=
e
1
˙
e
1
=
e
1
( ˙
x
1
−
˙
x
e
1
)
при
˙
x
1
=
x
2
= ˙
x
e
1
−
K
1
e
1
,
˙
V
1
=
−
K
1
e
2
1
≤
0
,
˙
x
e
1
=
x
2
+
K
1
e
1
.
(1)
При
i
= 2
V
2
=
V
1
+
1
2
e
2
2
)
˙
V
2
= ˙
V
1
+
e
2
˙
e
2
= ˙
V
1
+
e
2
( ˙
x
2
−
˙
x
e
2
)
,
когда
˙
х
е
2
=
F
ц
m
x
3
−
к
тр
m
x
2
−
P
f
m
+
K
2
е
2
,
(2)
˙
V
2
=
−
K
1
e
2
1
−
K
2
e
2
2
≤
0
.
При
i
= 3
V
3
=
V
2
+
1
2
e
2
3
)
˙
V
3
= ˙
V
2
+
e
3
˙
e
3
= ˙
V
2
+
e
3
( ˙
x
3
−
˙
x
е
3
)
,
когда
˙
x
е
3
=
2
B
ж
V
t
(
Q
з
(
x
3
, x
4
)
−
F
ц
x
2
+
C
y
x
3
) +
K
3
e
3
,
(3)
˙
V
3
=
−
K
1
e
2
1
−
K
2
e
2
2
−
K
3
e
2
3
≤
0
.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1 107


