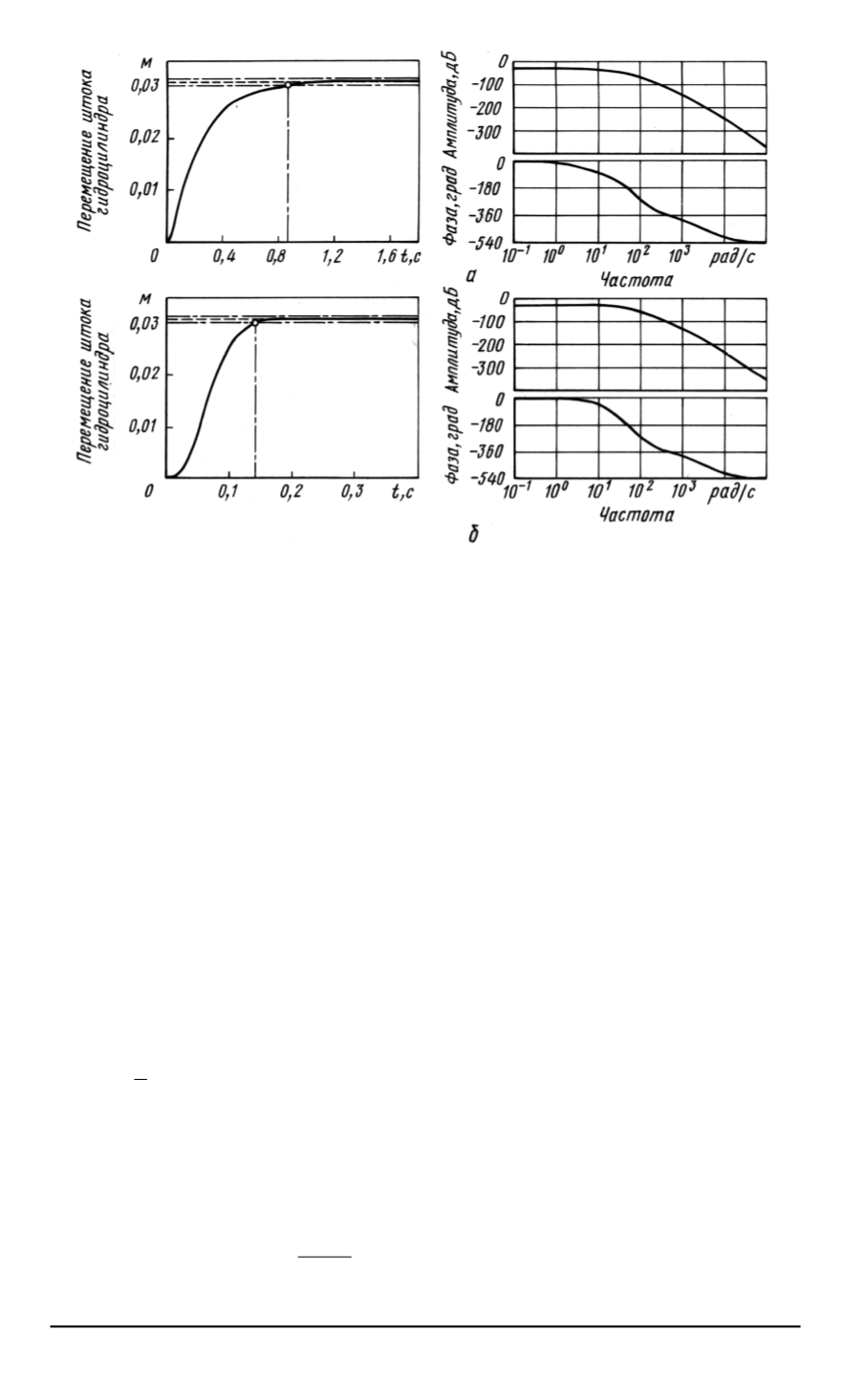
Рис. 3. Переходные и частотные характеристики замкнутого контура ЭГСП:
а
— с обратной связью по перемещению гидроцилиндра;
б
— с обратными связями
по переменным состояния
Из переходной и частотной характеристик ЭГСП следует, что необ-
ходимо уменьшить время установления процесса (рис. 3,
а
). Для это-
го достаточно увеличить коэффициент усиления
К
ус
. Однако суще-
ственное увеличение коэффициента усиления ограничено условием
устойчивости, в связи с чем была рассмотрена задача оптимального
управления ЭГСП с применением регуляторов переменных состоя-
ния. Решение получено с помощью уравнения Риккати и уравнения
управления системой [4, 6]:
PA
+
A
т
P
−
PBR
−
1
B
т
P
+
Q
= 0;
u
=
−
Kх
,
где
K
=
R
−
1
B
т
P
— матрица коэффициентов регуляторов перемен-
ных состояния;
P
— неотрицательная определенная симметричная
матрица;
Q
и
R
— положительно определенные симметричные весо-
вые матрицы. В данном случае матрица
Q
=
I
— единичная матрица и
R
−
1
=
1
r
, где
r
= 3
— весовой коэффициент.
Корректирующие устройства можно спроектировать на основе по-
исковых методов оптимизации.
Стандартная форма уравнений состояния линейной стационарной
непрерывной системы имеет вид:
d
x
(
t
)
dt
=
Aх
(
t
) +
Bu
(
t
);
y
(
t
) =
Cx
(
t
)
,
102 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1


