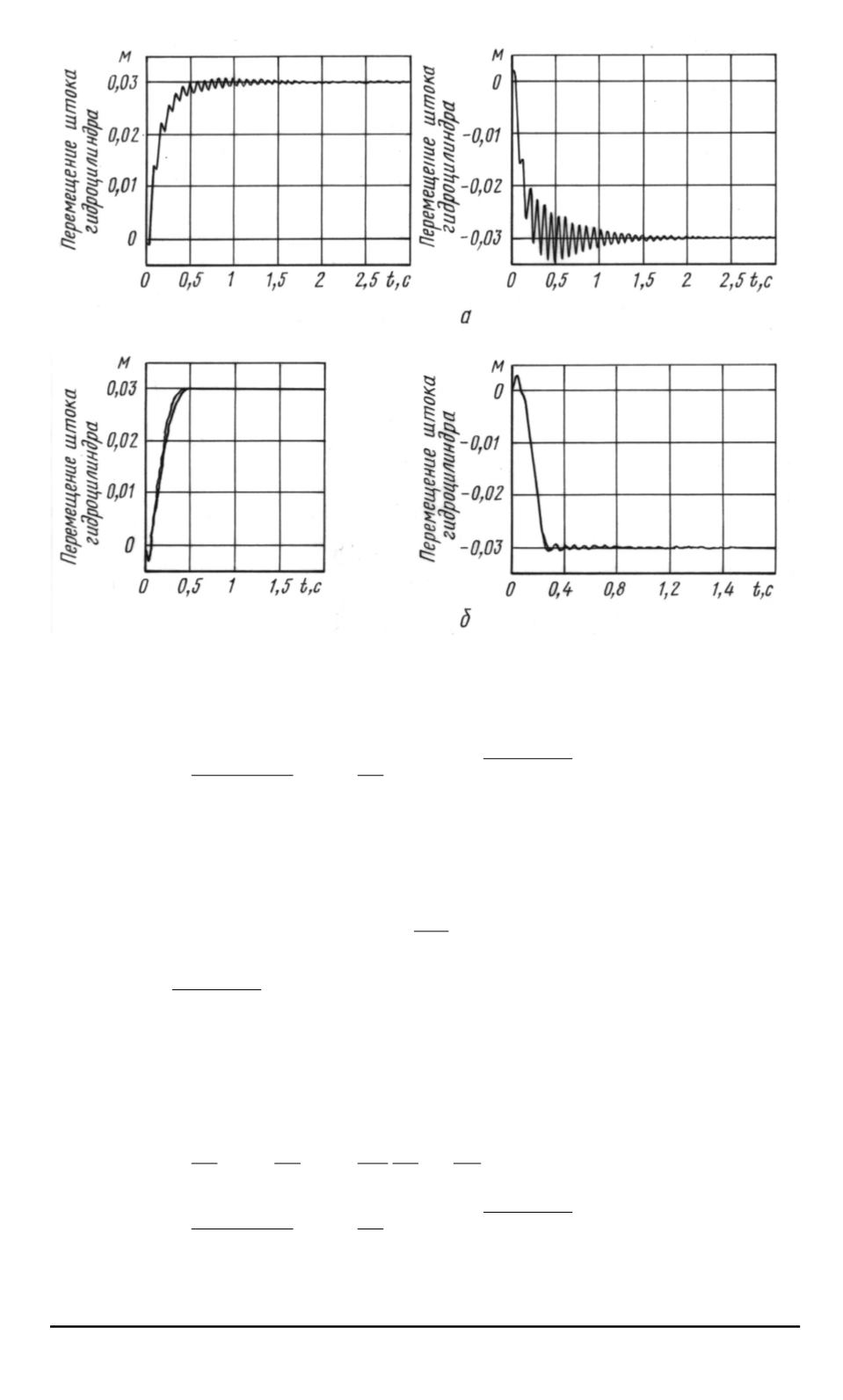
Рис. 8. Переходные характеристики нелинейного ЭГСП в случае дифференци-
ального гидроцилиндра:
а
и
б
— см. рис. 6
˙
x
е
4
=
B
ж
F
2
y
+
V
02
−
F
2
dy
dt
+
к
0
з
x
з
p
|
p
п
−
p
2
|
sign
(
p
п
−
p
2
)
−
−
C
y
(
p
2
−
p
1
) +
K
4
e
4
;
˙
x
е
5
=
x
6
+
K
5
e
5
;
˙
x
е
6
=
−
ω
2
ЭГУ
x
з
−
2
ς
ЭГУ
ω
ЭГУ
dx
з
dt
+
ω
2
ЭГУ
u
;
u
=
1
К
х
u
ω
2
ЭГУ
( ˙
x
е
6
+
ω
2
ЭГУ
x
e
5
+ 2
ς
ЭГУ
ω
ЭГУ
x
e
6
);
при
х
з
>
0
˙
x
е
1
=
x
2
+
K
1
e
1
;
˙
x
е
2
=
F
1
m
p
1
−
F
2
m
p
2
−
к
тр
m
dy
dt
−
P
f
m
+
K
2
e
2
;
˙
x
е
3
=
B
ж
F
1
y
+
V
01
−
F
1
dy
dt
+
к
0
з
x
з
p
|
p
п
−
p
1
|
sign
(
p
п
−
p
1
)
−
−
C
y
(
p
1
−
p
2
) +
K
3
e
3
;
110 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1


