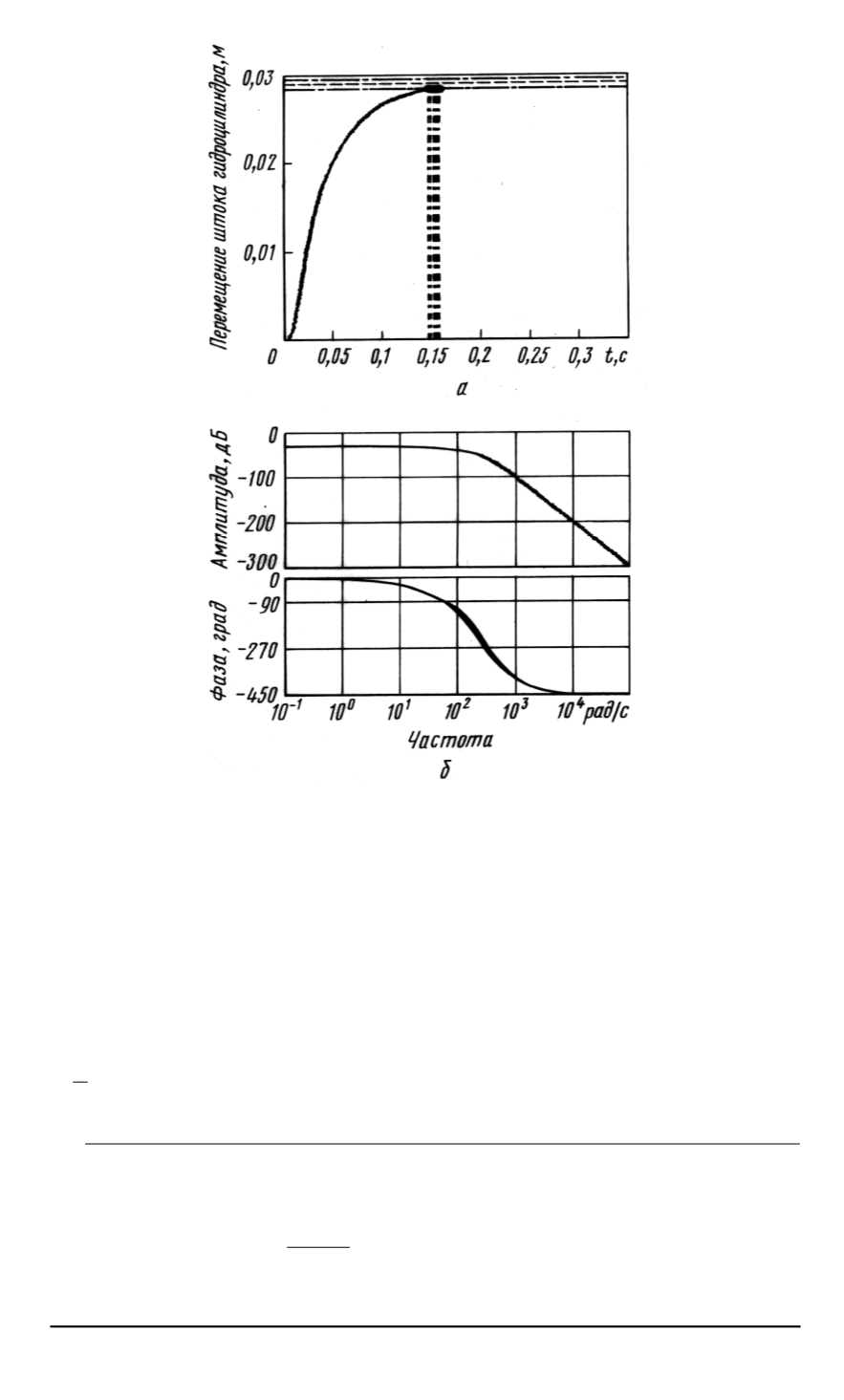
Рис. 5. Переходные и частотные характеристики замкнутого контура ЭГСП при
разной нагрузке на его выходное звено
В результате вычислены переходные и частотные характеристики
выбранной модели ЭГСП, которые подтверждают, что динамические
характеристики модели не изменяются, когда меняется нагрузка на
выходное звено ЭГСП (рис. 5). Для дальнейшего исследования струк-
турную схему (см. рис. 2,
б
) эталонной модели оптимального ЭГСП
можно представить как в форме “вход-выход”:
у
u
=
=
5
,
16
∙
10
12
53
s
5
+3
,
395
∙
10
5
s
4
+5
,
417
∙
10
8
s
3
+4
,
77
∙
10
10
s
2
+4
,
191
∙
10
12
s
+4
,
526
∙
10
13
,
так и в переменных состояния
d
x
e
(
t
)
dt
=
A
e
х
e
(
t
) +
B
e
u
(
t
);
y
(
t
) =
C
e
x
e
(
t
)
,
104 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1


