где
d
x
(
t
)
dt
— производная по времени от вектора
x
(
t
)
состояния раз-
мерности (
n
×
1
);
A
— матрица коэффициентов системы (
n
×
n
);
B
—
матрица входа (
n
×
m
);
С
— матрица выхода (
r
×
n
);
u
(
t
)
— вектор
входа размерности (
m
×
1
);
y
(
t
)
— вектор выхода размерности (
r
×
1
).
После определения коэффициентов регуляторов состояния постро-
ена структурная схема ЭГСП (рис. 2,
б
). Из схемы видно, что исполь-
зовались только три переменных состояния: перемещение, скорость
и ускорение штока ГЦ. Это допустимо при частоте пропускаемого
сигнала ЭГУ, в 5. . . 10 раз превышающей собственную частоту ГЦ.
Переходные и частотные характеристики, вычисленные с помощью
структурной схемы ЭГСП, приведены на рис. 3,
б
. Переходные харак-
теристики показывают, что быстродействие ЭГСП значительно увели-
чилось.
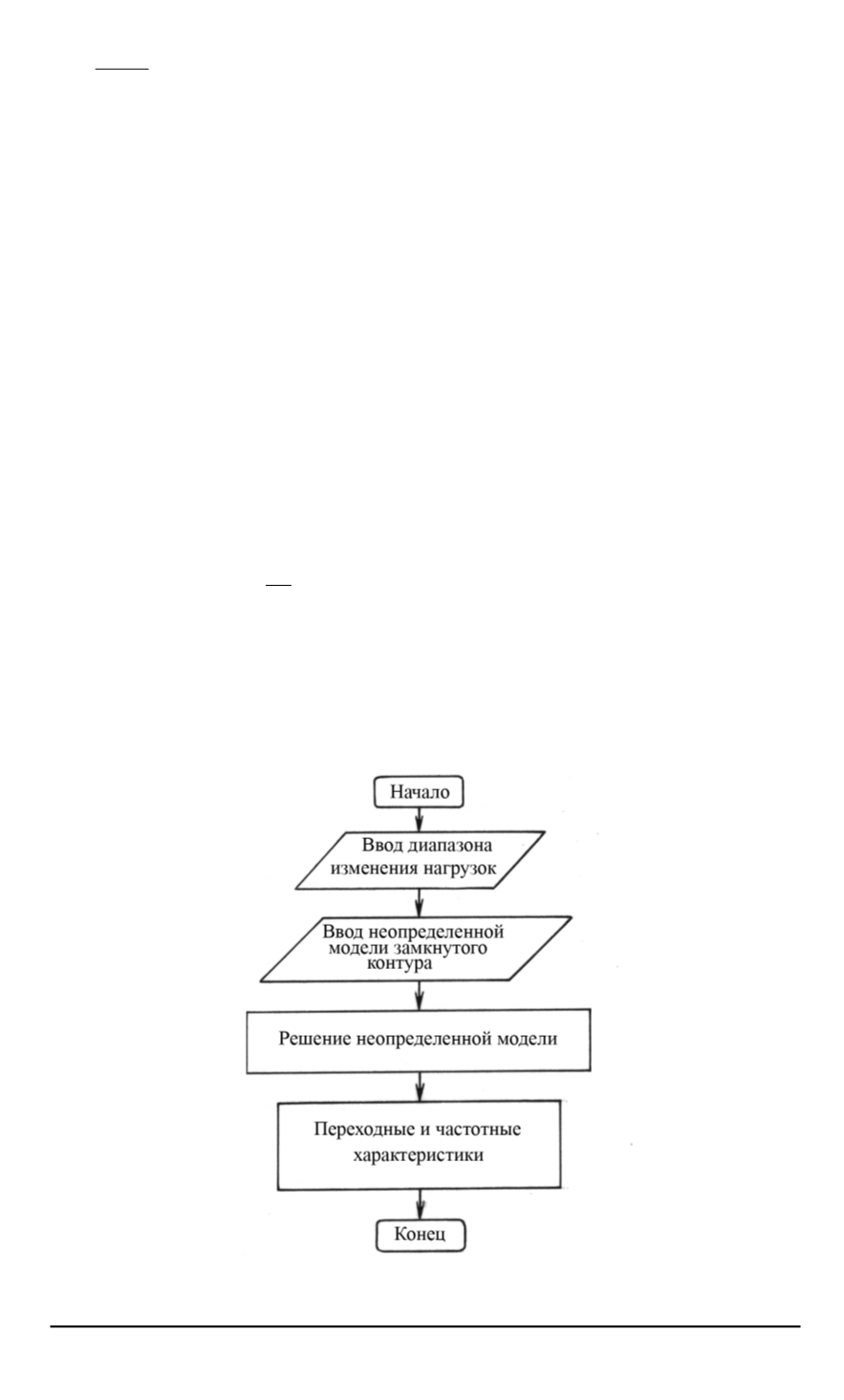
Оценка влияния переменной нагрузки на выходное звено ЭГСП
проведена в соответствии с алгоритмом (рис. 4). В этой блок-схеме не-
определенную модель ЭГСП описывают следующие уравнения [2, 3]:
d
x
dt
=
(A
+ Δ
A)x
(
t
) +
Bu
(
t
);
y
(
t
) =
Cx
(
t
)
,
где
Δ
— диапазон неопределенности при изменении нагрузки на вы-
ходное звено ЭГСП в пределах
±
25
%.
Рис. 4. Блок-схема программы оценки влияния переменной нагрузки на выход-
ное звено ЭГСП
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1 103


