времени обмотки управления;
R
у
, L
у
и
i
у
— сопротивление, индук-
тивность и ток обмоток управления;
R
вых
— активное сопротивление
выходного канала ЭУ;
T
ЭГУ
=
1
ω
ЭГУ
— постоянная времени ЭГУ;
ω
ЭГУ
и
ς
ЭГУ
— собственная частота и коэффициент демпфирования ЭГУ;
К
iu
=
1
R
y
+
R
вых
— коэффициент передачи обмотки управления;
К
Qi
— коэффициент передачи ЭГУ.
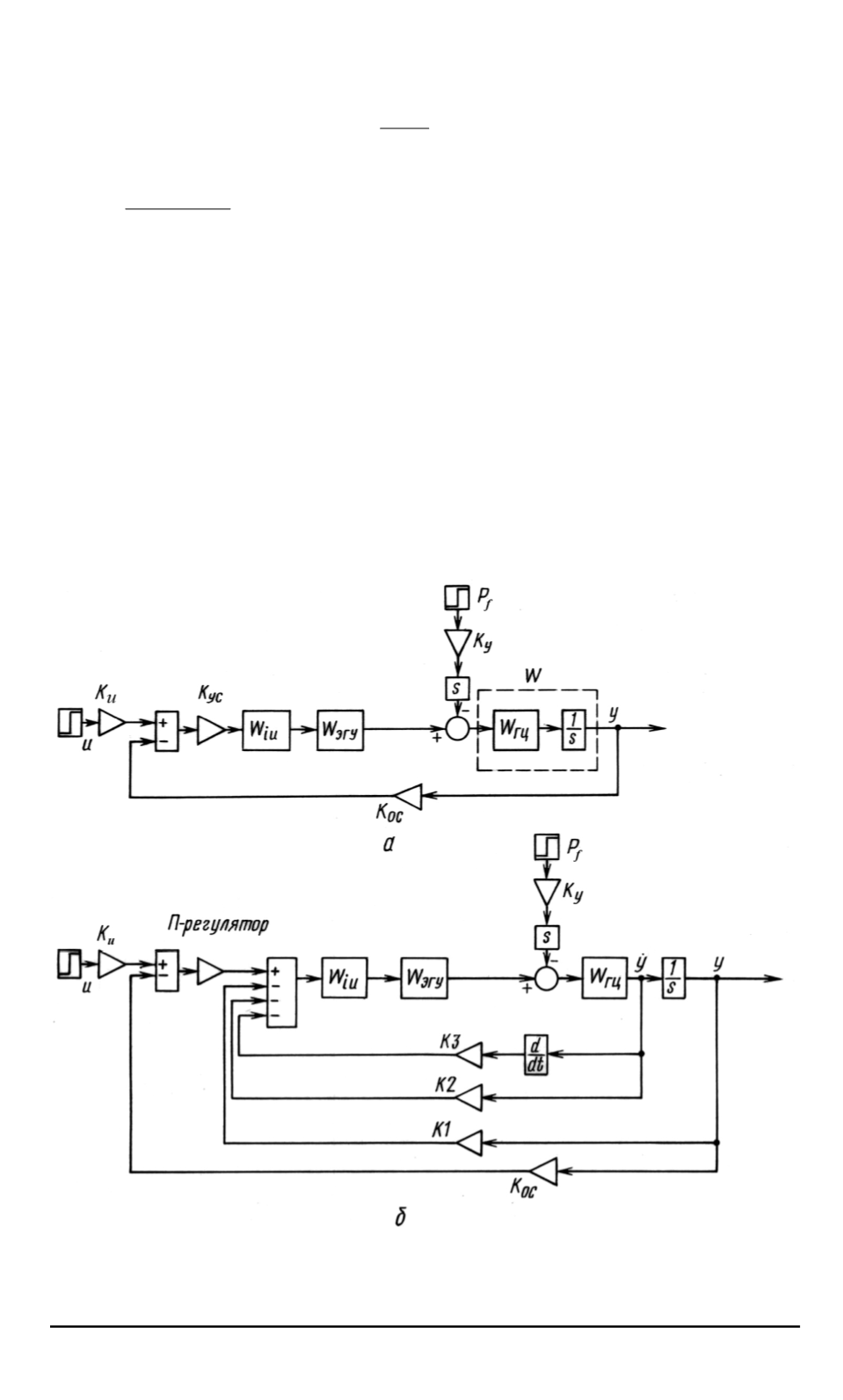
Для компьютерного моделирования ЭГСП с помощью приведен-
ных передаточных функций построена структурная схема (рис. 2,
а
).
При моделировании определяли переходную и частотную характери-
стики замкнутого контура ЭГСП с параметрами:
Q
з
max
= 5
∙
10
−
4
м
3
/с;
р
п
max
= 15
МПа;
у
max
= 1
,
85
м;
F
ц
= 4
∙
10
−
3
м
2
;
V
0
= 3
,
7
∙
10
−
3
м
3
;
R
у
= 140
Ом;
R
вых
= 1000
Ом;
I
у max
= 20
мA;
L
у
= 0
,
44
Гн;
ω
ЭГУ
=
= 578
рад/с;
ς
ЭГУ
= 3
,
3
;
m
= 2000
кг;
к
тр
= 1
,
06
∙
10
5
Нс/м;
В
ж
=
= 1250
МПа;
Р
сл
= 0
;
К
Qi
= 0
,
3
;
К
ус
= 3
,
8
;
К
u
= 0
,
25
;
К
ос
= 8
,
11
В/м
— коэффициент обратной связи.
Рис. 2. Структурная схема ЭГСП:
а
— с обратной связью по перемещению штока гидроцилиндра;
б
— с обратными
связями по переменным состояния
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1 101


