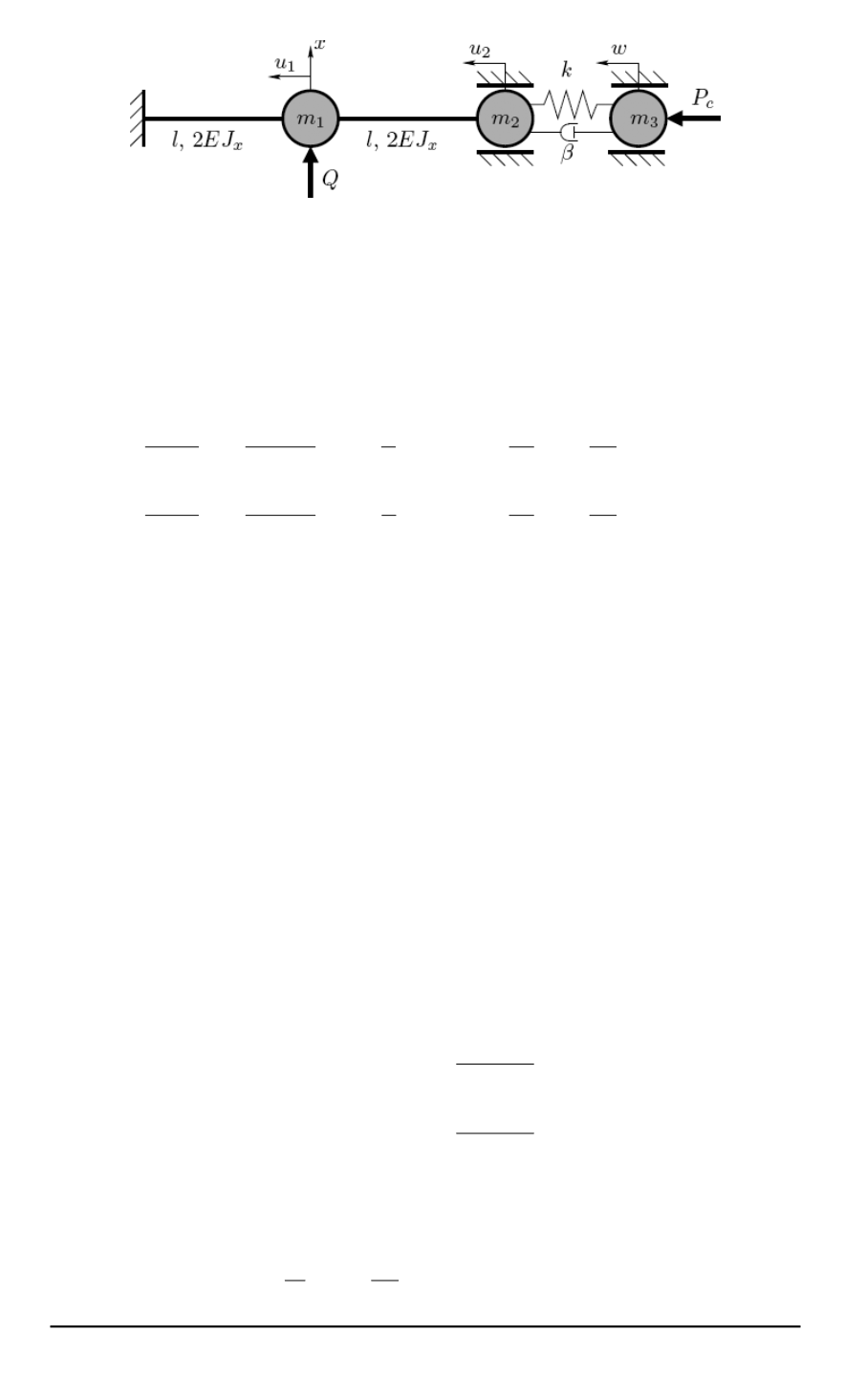
Рис. 3. Расчетная схема механической составляющей системы
где
n
3
— число витков обмоток в цепи подмагничивания;
i
3
— ток в
цепи подмагничивания. Соотношения (3) — это закон Ома для магнит-
ных цепей электромагнитов, причем параметры в левых частях равны
значениям магнитодвижущих сил.
После подстановки соотношений (3) в уравнения (2) получаем
˙Φ
1
+
RR
м
n
2
+ 2
R d
n
2
μ
0
S
1 +
x
d
Φ
1
−
R
n
3
n
2
i
3
=
U
0
n
sin(2
π
Ω
t
);
˙Φ
2
+
RR
м
n
2
+ 2
R d
n
2
μ
0
S
1
−
x
d
Φ
2
+
R
n
3
n
2
i
3
=
U
0
n
sin(2
π
Ω
t
)
.
(4)
Ток
i
3
в цепи подмагничивания определяется независимо от динамики
системы, поэтому в дальнейшем считается известным.
Используя условие жесткого соединения якорей, расчетную схему
механической составляющей системы можно привести к виду, пока-
занному на рис. 3. Полученная система имеет две степени свободы:
поперечные
x
и продольное
w
перемещения якорей и инструмента.
Остальные обозначения на рис. 3 имеют следующий смысл:
m
1
,
m
2
,
m
3
— суммарная масса якорей, масса дополнительного элемента и ин-
струмента соответственно;
l
,
EJ
x
— длина и жесткость балки;
Q
—
пондеромоторная сила;
P
c
— осевая составляющая силы резания.
Продольные перемещения
u
1
якорей и дополнительной массы
u
2
выражаются через поперечное перемещение
x
якоря. Для получения
этой связи представим форму изогнутой оси балок в виде уравнения
v
(
t, s
) =
x
(
t
)
f
(
s
)
, где
s
2
[0
,
1]
— безразмерная продольная коорди-
ната сечений балки. Функция
f
(
s
)
должна удовлетворять следующим
граничным условиям:
s
= 0 :
v
(
t,
0) = 0
,
∂v
(
t, s
)
∂s
s
=0
= 0;
s
= 1 :
v
(
t,
1) = 1
,
∂v
(
t, s
)
∂s
s
=1
= 0
.
Тогда перемещения
u
1
(
t
)
и
u
2
(
t
)
выражаются через поперечное пере-
мещение якоря
x
следующим образом:
u
1
(
t
) =
1
2
l
Z
1
0
∂v
∂s
2
ds
;
u
2
(
t
) = 2
u
1
(
t
)
.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 1 63


