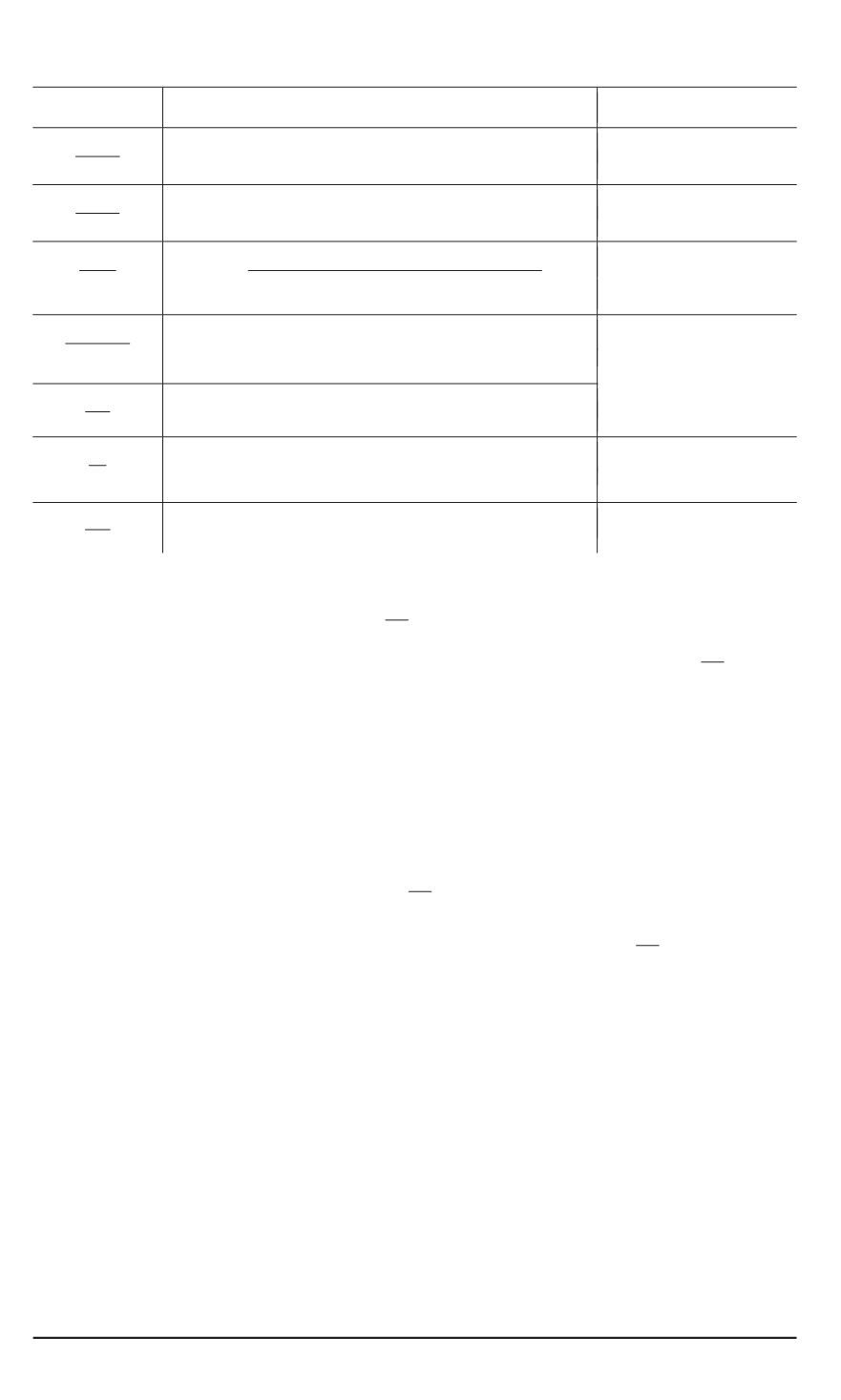
Таблица 1
Выходные параметры траектории перемещения СУ
Обозначение
Характеристика параметра
Примечание
Δ
X
н
Δ
Z
н
Отклонение начала траектории по осям
Х
и
Z
Отклонение размера
Δ
X
к
Δ
Z
к
Отклонение конца траектории по осям
Х
и
Z
Отклонение размера
tg
β
tg
α
Наклон траектории
Наибольшийнаклон траект ории
Отклонение
формы
Δ
X
min
Δ
X
max
Минимальное и максимальное отклонения
траектории
Отклонение размера
Х
р
B
Размах траектории
B
a
Шаг и высота периодических волн
Волнистость
t
w
a
w
Шаг и высота высокочастотных волн Шероховатость
отклонений, можно найти по уравнению
Δ
X
(
Z
з
) = Δ
X
(
Z
з
)
±
U
γ
σ
Z
з
(
x
)
,
(1)
где
Z
з
— заданное значение управляемойкоординаты
Z
;
Δ
X
(
Z
з
)
—
математическое ожидание отклонения при фиксированном значении
Z
з
;
U
γ
— квантиль нормального распределения при заданнойвероят-
ности
γ
;
σ
Z
з
(
x
)
— среднеквадратическое отклонение, соответствующее
фиксированному значению
Z
з
.
Корреляционная функция от траектории как случайной функции
имеет вид
K
(
Z
з1
, Z
з2
) =
M
Δ
X
(
Z
з1
)
−
Δ
X
(
Z
з1
)
×
×
Δ
X
(
Z
з2
)
−
Δ
X
(
Z
з2
)
,
(2)
где
Z
з1
,
Z
з2
— значения аргумента
Z
з
.
Доказано свойство эргодичности траектории как случайной функ-
ции.
Группу траекторий, реализованных при фиксированных условиях,
называют ансамблем. Найдем параметры ансамблейтраекторийпо-
ступательного перемещения СУ (рис. 2, табл. 2), правила и зависимо-
сти для определения их значений. Ансамбли траекторий заключают в
себе диагностическую информацию. Широкополосные совокупности
траекторий характерны для внешних силовых воздействий. Узкопо-
лосные совокупности характерны при доминирующем влиянии геоме-
трических погрешностейнаправляющих. Угловая миграция ансамбля
94 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 2


