














 14 / 18
14 / 18

В.А. Горелов, Б.В. Падалкин, О.И. Чудаков
134
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2017. № 2
мотор–колесо. В базовом варианте привод каждого колеса тягача реализован с
помощью ТЭД мощностью 60 кВт (см. рис. 9,
б
). Таким образом, суммарная
мощность всех ТЭД тягача составляет 480 кВт. Мощность тяговых электродви-
гателей активного автопоезда подобрана таким образом, чтобы удельная мощ-
ность всех вариантов была одинакова. Частичные характеристики ТЭД были
получены путем умножения на коэффициент использования мощности.
Рассмотрены три варианта распределения мощности между звеньями авто-
поезда: в первом вся мощность подводится к колесам тягача (базовый вариант);
во втором и третьем часть общей мощности (25 % и 50 %) подводится к колесам
полуприцепа. Характеристики взаимодействия движителя с опорным основа-
нием приведены на рис. 5 (φ
max
= 0,55;
f
w
0
= 0,16). Вычислительные эксперимен-
ты проводили при различной массе полуприцепа. Определяли угол преодолева-
емого подъема при максимально возможной в заданных условиях массе автопо-
езда. Кроме того, определяли максимальную скорость автопоезда полной массы
при движении на подъем при разных углах наклона опорной поверхности. Ре-
зультаты расчетов представлены на рис. 10 и 11.
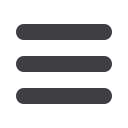
Рис. 10.
Зависимость максимальной тран-
спортируемой массы полуприцепа от угла
преодолеваемого подъема для различных
случаев распределения мощности силовой
установки между звеньями:
1
— базовый вариант;
2
,
3
— 25 %, 50 % общей
мощности на полуприцеп
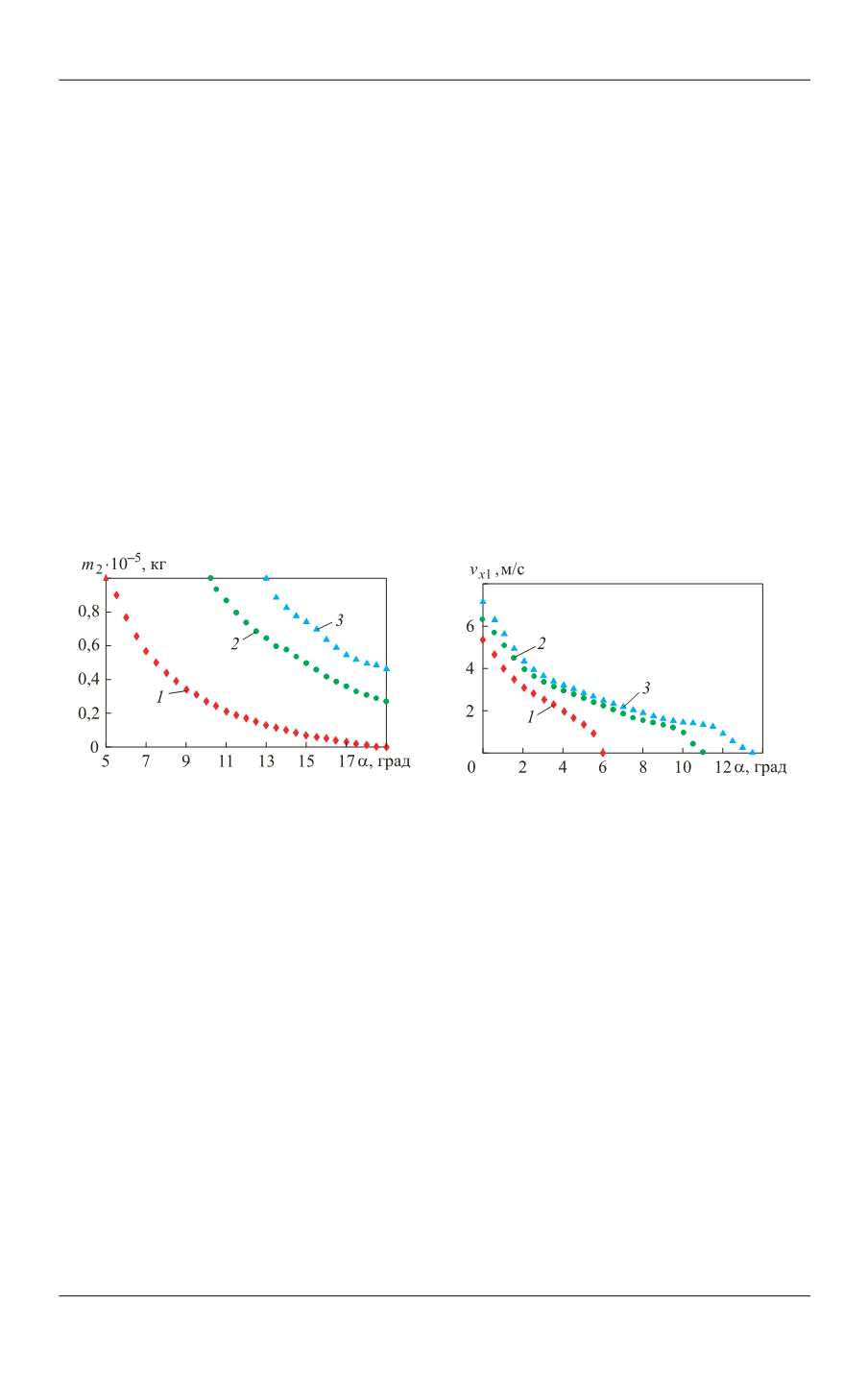
Рис. 11.
Зависимость максимальной ско-
рости автопоезда от угла преодолеваемого
подъема для разных случаев распределе-
ния мощности силовой установки между
звеньями (кривые
1
,
2
,
3
— см. рис. 10)
Анализ этих результатов позволил сделать вывод, что при движении на рас-
смотренном опорном основании активизация колес полуприцепа приводит к
увеличению угла преодолеваемого подъема. Автопоезд полной массы базового
варианта теряет подвижность при угле подъема 6°, при втором варианте (45/20)
преодолеваемый угол подъема увеличился до 11°, при третьем (30/40) — до
13,5°. Из рис. 11 следует, что автопоезд базового варианта развивает наимень-
шую скорость по сравнению с автопоездами двух других вариантов как при
движении по горизонтальной поверхности, так и на подъеме.
Выводы.
1. Разработана модель и программа расчета, которая позволяет
исследовать динамику двухзвенного седельного автопоезда при прямолинейном