














 13 / 18
13 / 18

Математическая модель прямолинейного движения по деформируемой опорной поверхности…
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2017. № 2
133
ные подсистемы: «Car», в которой моделируется движение автомобиля-тягача,
«Trailer», в которой моделируется движение полуприцепа, «Hitch», в которой рас-
считывается продольная составляющая нагрузки на ССУ и «Diesel-generator», в ко-
торой моделируется силовая установка автопоезда (рис. 8,
б
).
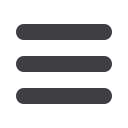
При моделировании силовой установки были использованы характеристи-
ки двигателей, представленные на рис. 9. Характеристика дизельного двигателя
задана в блоке одномерной таблицы. Вектором входных значений является ча-
стота вращения, а вектором выходных — мощность дизель-генераторной уста-
новки (рис. 9,
а
). В характеристике тягового электродвигателя (ТЭД) учтен КПД,
который показывает отношение развиваемой мощности к потребляемой в слу-
чае работы по внешней характеристике (рис. 9,
б
). При реализации модели ди-
зель-генераторной установки использованы результаты стендовых испытаний
(рис. 9,
в
).
Рис. 9.
Характеристики: дизельный двигатель (
а
), ТЭД (
б
), дизель-генератор (
в
)
Результаты расчетов.
С помощью разработанной математической модели
выполнена оценка эффекта, который дает использование привода колес при-
цепного звена. В качестве оценочного показателя тяговой динамики автопоез-
дов при моделировании принято максимальное значение угла преодолеваемого
подъема. Методика проведения вычислительного эксперимента состоит в сле-
дующем: автопоезд начинает движение после предварительной остановки на
подъеме. Испытание считается пройденным, если автопоезд смог развить
устойчивую скорость движения на подъеме.
В качестве объекта исследований выбран двухзвенный седельный автопоезд
полной массой 115 000 кг (максимальная масса полуприцепа 90 000 кг), базовый
вариант — автопоезд с пассивным полуприцепом. Альтернативные варианты
отличаются тем, что в них реализован привод колес полуприцепа. Трансмиссия
тягача и полуприцепа — электромеханическая, выполненная по схеме электро-