














 7 / 18
7 / 18

Математическая модель прямолинейного движения по деформируемой опорной поверхности…
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2017. № 2
127
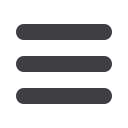
Рис. 4.
Экспериментальные характеристики взаимодействия шины 28,1R26 с грунтом
Подставим в полученное выражение значение
Р
x
r
к
из уравнения (3) и запи-
шем
к к к
к
,
w z
M M f P r
откуда получим
к
к
к
1
.
w
z
f
M P r
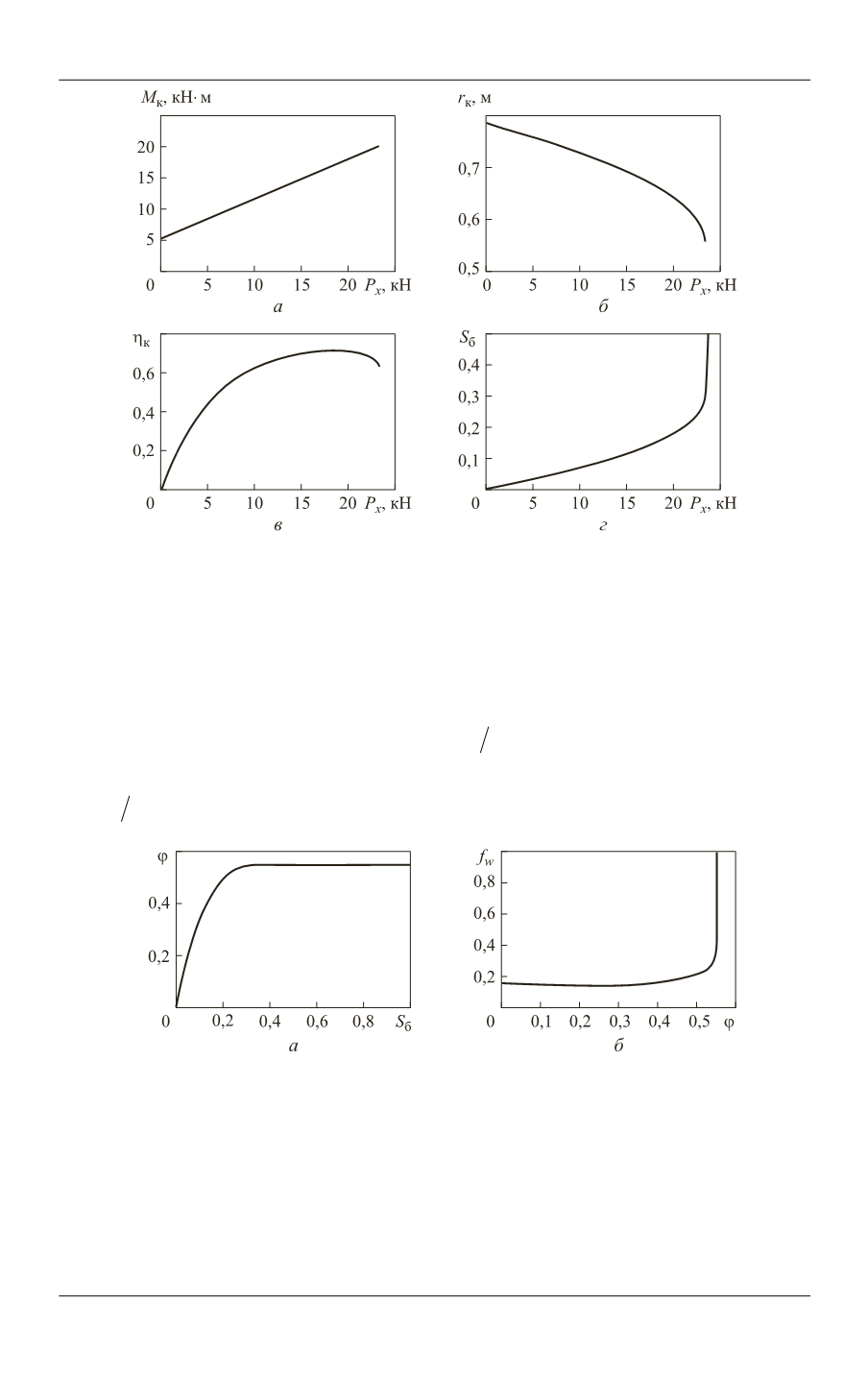
Зависимость φ =
f
(
S
б
) получим из графика
S
б
(
Р
x
) (рис. 4,
г
), учитывая, что
.
x z
Р Р
Окончательный вид характеристик приведен на рис. 5.
Рис. 5.
Характеристики взаимодействия колеса с деформируемым грунтом:
а
— тягово-сцепная;
б
— тягово-энергетическая
Методика использования экспериментальных характеристик при имита-
ционном моделировании прямолинейной динамики одиночного колеса по-
дробно рассмотрена в [9]. Расчетные схемы одиночного колеса при ведущем и
ведомом режимах представлены на рис. 6, динамика колеса при ведущем режи-
ме описывается системой уравнений (4):