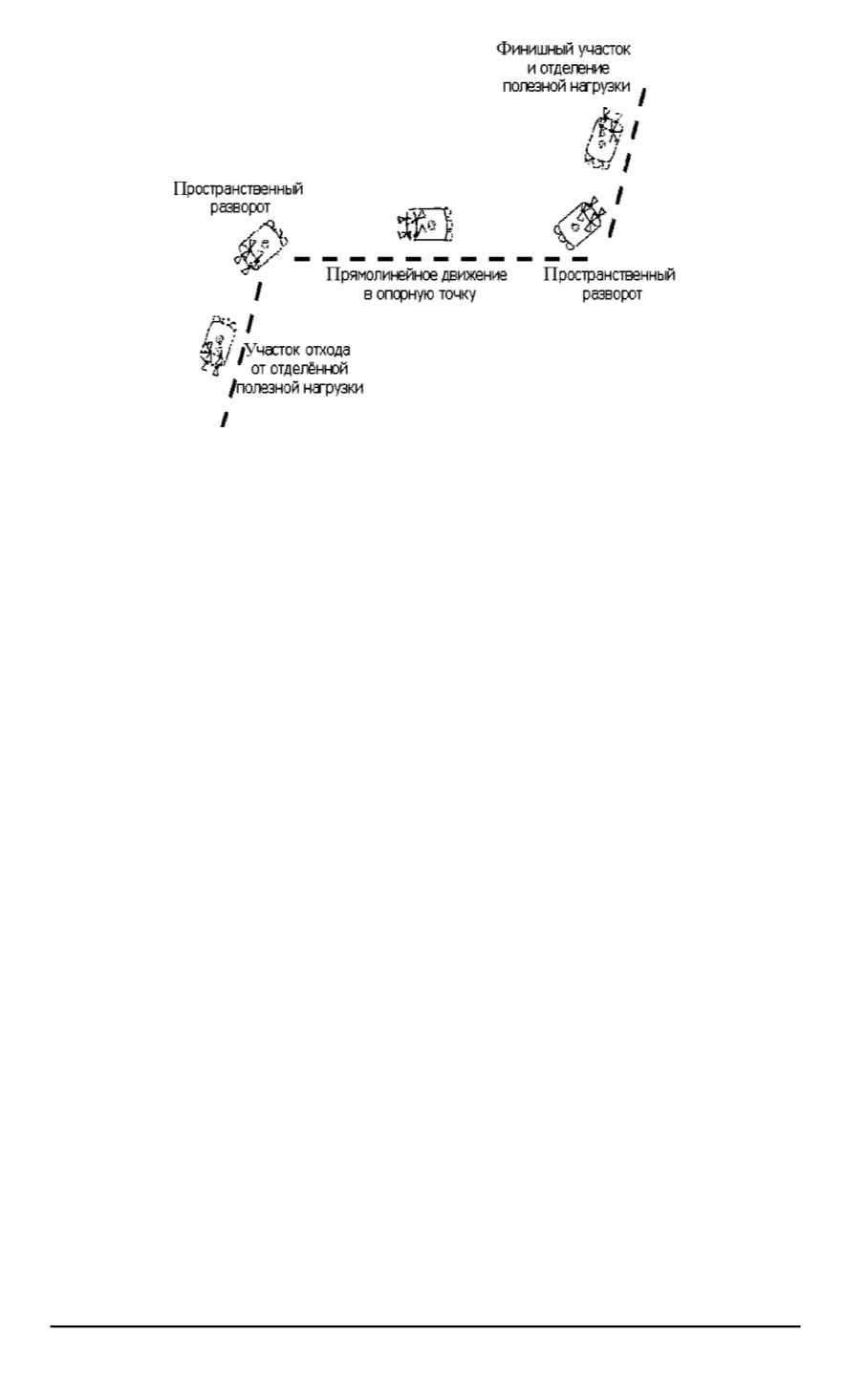
Рис. 2. Траектория ДС на участке движения между двумя ТО ПН
Направления решения задачи оптимизации управления движе-
нием ДС.
Рассмотрим типичную траекторию движения ДС и характер
совершаемых ею маневров. Несмотря на то, что число ПН и длины
участков движения могут быть различными, траектория движения от
одной ТО ПН до другой, включающая пять участков, является для ДС
стандартной и схематично изображена на рис. 2.
В соответствии с приведенной траекторией можно ввести следую-
щие направления оптимизации движения ДС: оптимизация поступа-
тельного движения в направлении продольной оси (движение изделия
в режиме маршевой тяги на длительных участках), оптимизация про-
странственных поворотов и применение АУ движением ДС в боковых
направлениях. Рассмотрим два последних варианта более подробно.
Оптимизация пространственных поворотов ДС.
В СУ несколь-
ких поколений ДС используется так называемая традиционная схема
пространственного разворота. Согласно ей, начальное угловое поло-
жение ДС описывается текущими углами ГСП
ϑ
н
,
ψ
н
,
ϕ
н
перед на-
чалом разворота. Конечное положение определяется навигационными
углами
ϑ
к
,
ψ
к
,
ϕ
к
, соответствующими концу разворота. Основой алго-
ритма разворота является отработка имеющихся в каналах управления
угловых рассогласований (УР)
Δ
β
=
β
n
−
β
к
, β
=
ϑ, ψ, ϕ
(2)
между текущими углами ГСП и навигационными углами.
Пусть
k
max
— уровень ограничения УР на развороте, полученный из
соображений высокой динамики разворота при минимальном уровне
динамических ошибок. Для каждого канала это значение уменьшается
пропорционально величине отношения имеющегося в канале УР и
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1 115


