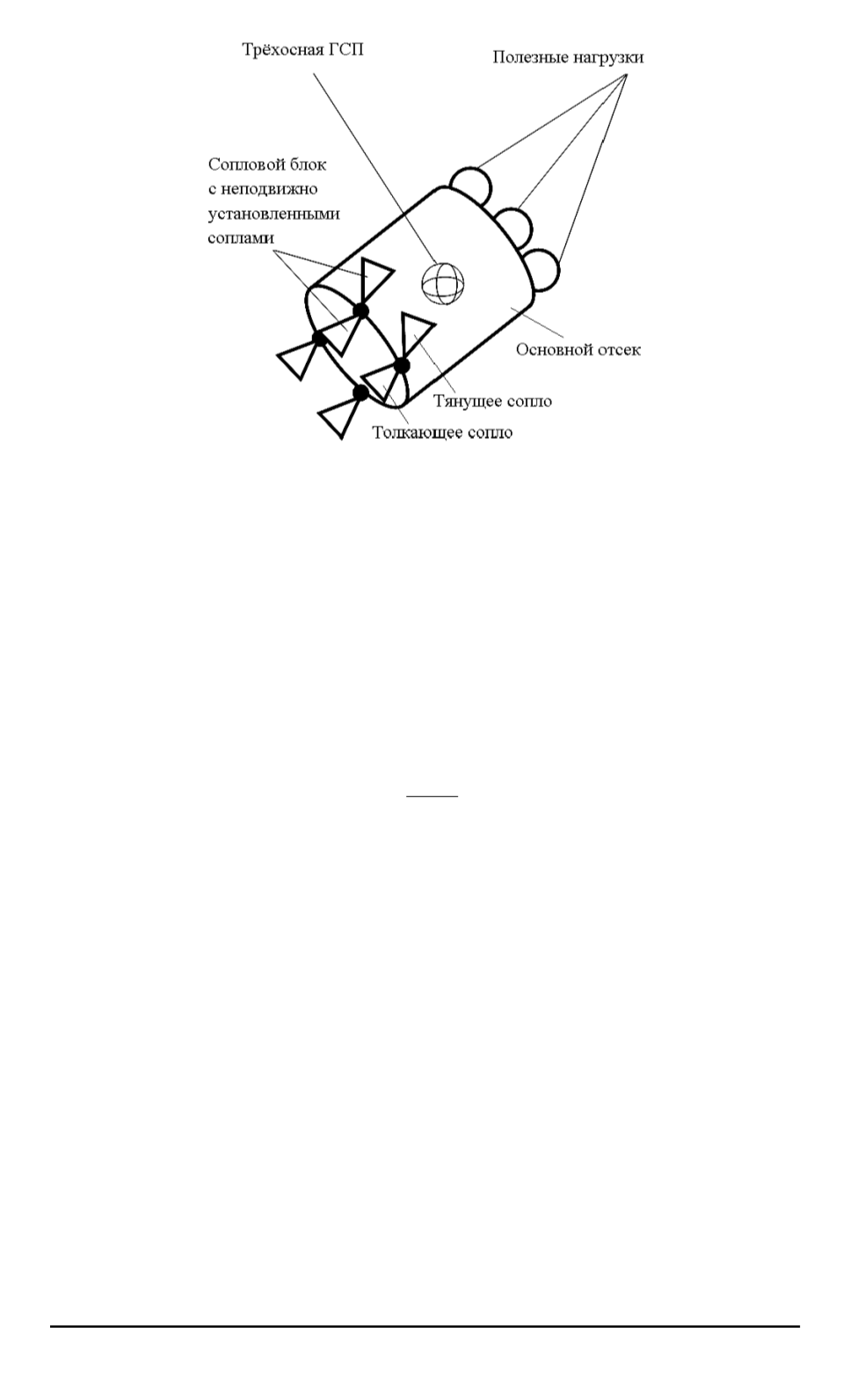
Рис. 1. Схематический вид ДС
модель поступательного и вращательного движения ДС заметно упро-
щается [1, 2]:
m
˙
V
ξ
=
P
cos
ϑ
cos
ψ
;
m
˙
V
η
=
P
sin
ϑ
−
g
0
;
m
˙
V
ζ
=
−
P
cos
ϑ
sin
ψ
;
˙
ξ
=
V
ξ
;
˙
η
=
V
η
;
˙
ζ
=
V
ζ
;
I
X
˙
ω
X
= (
I
Y
−
I
Z
)
ω
Y
ω
Z
+
M
Σ
X
;
I
Y
˙
ω
Y
= (
I
Z
−
I
X
)
ω
Z
ω
X
+
M
Σ
Y
;
I
Z
˙
ω
Z
= (
I
X
−
I
Y
)
ω
X
ω
Y
+
M
Σ
Z
;
˙
ϕ
=
ω
X
−
tg
ϑ
(
ω
Y
cos
ϕ
−
ω
Z
sin
ϕ
);
˙
ϑ
=
ω
Y
sin
ϕ
+
ω
Z
cos
ϕ
;
˙
ψ
=
1
cos
ϑ
(
ω
Y
cos
ϕ
−
ω
Z
sin
ϕ
);
m
=
m
0
t
Z
0
|
˙
m
(
τ
)
|
dτ.
(1)
Здесь
V
ξ
, V
η
, V
ζ
— компоненты скорости центра масс (ЦМ) ДС;
P
—
сила тяги (СТ) ДУ;
m
и
m
0
— текущая и начальная масса ДС;
|
˙
m
(
τ
)
|
—
массовый секундный расход топлива;
ω
X
, ω
Y
, ω
Z
— проекции вектора
абсолютной угловой скорости (УС) ДС на оси ССК;
I
X
, I
Y
, I
Z
— осе-
вые моменты инерции ДС;
M
Σ
i
=
M
упр
i
+
M
в
i
— сумма управляющего
и возмущающего моментов;
ϕ, ϑ, ψ
— углы крена, тангажа и рысканья
(углы Эйлера–Крылова), измеряемые трехосной гиростабилизирован-
ной платформой (ГСП).
В качестве ДУ используется твердотопливный двигатель с регули-
руемой тягой (ТРДУ), обеспечивающий движение ДС в пониженном,
промежуточном и маршевом режимах. Использование в ДУ твердо-
го топлива позволяет исключить из модели изделия учет колебаний
жидкого топлива в баках.
114 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2007. № 1


