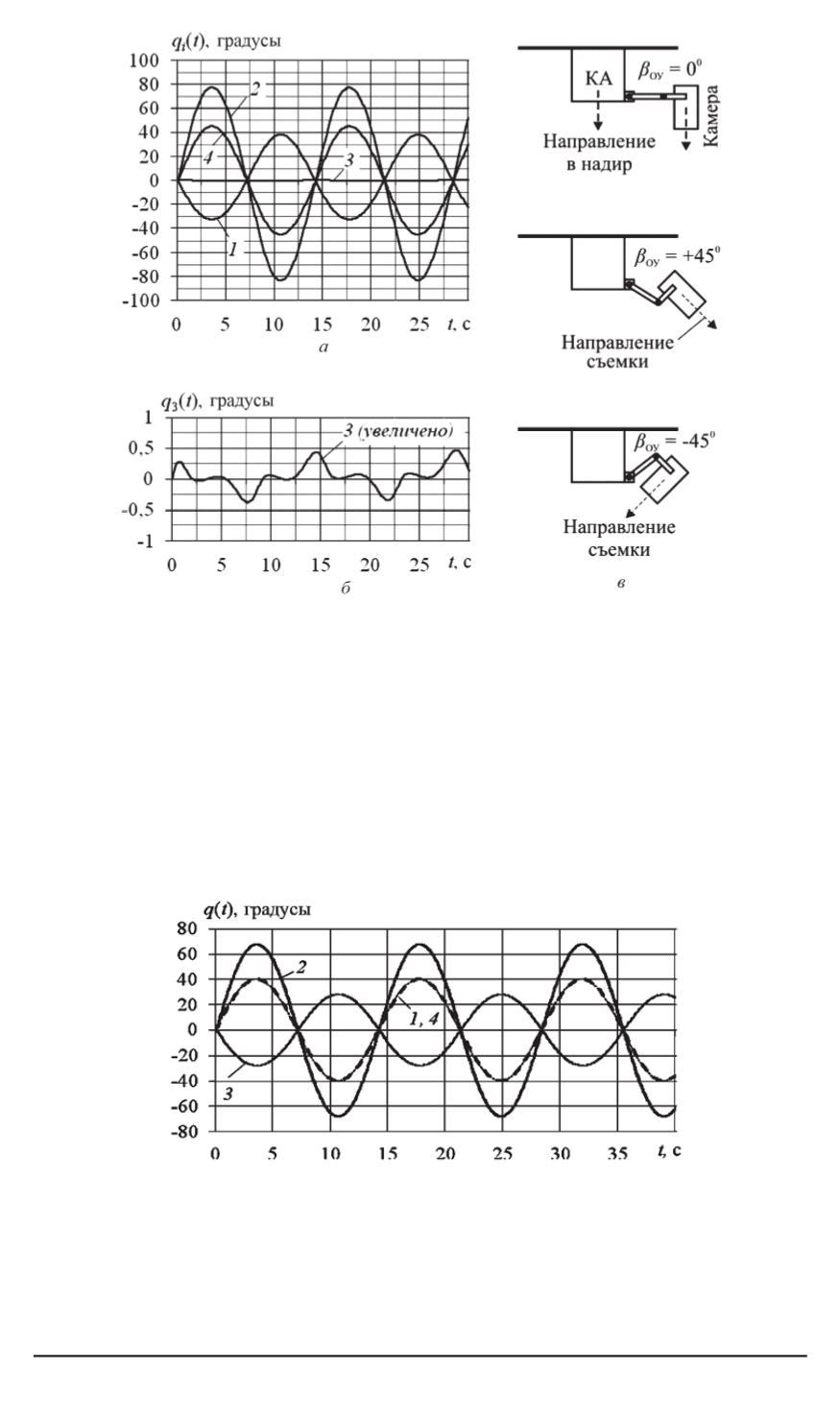
Рис. 3. Результаты моделирования процесса наведения камеры при использо-
вании двухзвенного механизма:
а
— зависимость обобщенных координат всех вращательных звеньев системы от вре-
мени;
б
— возмущения углового положения КА в плоскости наведения, вызванные
движением камеры;
в
— кинематические эскизы системы в исходном положении и
при повороте камеры на максимальные углы в плоскости наведения;
1
,
2
— движение
звеньев поворотного механизма (
q
4
(
t
)
и
q
5
(
t
)
) по плановым траекториям обобщен-
ных координат
q
вх
4
(
t
)
и
q
вх
5
(
t
)
;
3
— возмущения углового положения КА в плоскости
наведения, вызванные движением камеры,
q
3
(
t
)
;
4
— движение камеры в базовой СК
β
оу
(
t
)
по заданному закону вращения
β
∗
оу
(
t
)
с учетом возмущений КА
Рис. 4. Результаты моделирования процессов движения камеры на КА при ис-
пользовании одностепенного поворотного механизма:
1
— заданный закон вращения камеры в плоскости базовой СК,
β
∗
оу
(
t
)
;
2
— движение
поворотного механизма относительно КА
q
4
(
t
)
для отслеживания камерой заданного
закона вращения
q
вх
4
(
t
)
;
3
— движение КА в базовой СК вследствие динамического
взаимовлияния,
q
3
(
t
)
;
4
— движение камеры в базовой СК,
β
оу
(
t
)
48 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 3


