Движение такого зеркала при его установке на малом КА массой
150. . . 200 кг будет приводить к неизбежным возмущениям КА.
Компенсация динамического влияния камеры на КА при ис-
пользовании двухзвенного поворотного механизма.
Анализзависи-
мости перемещения КА от перемещения камеры, управляемой одно-
степенным механизмом, выявил возможность компенсации динами-
ческого влияния камеры на КА введением в систему как минимум
одной дополнительной управляемой координаты в плоскости наве-
дения камеры. В настоящей работе рассматривается введение этой
координаты в структуру поворотного механизма. Таким образом, по-
воротный механизм представляет собой двухзвенник, размещенный на
свободном основании (на КА). Движение системы КА на свободном
основании + камера на двухзвенном поворотном механизме рассма-
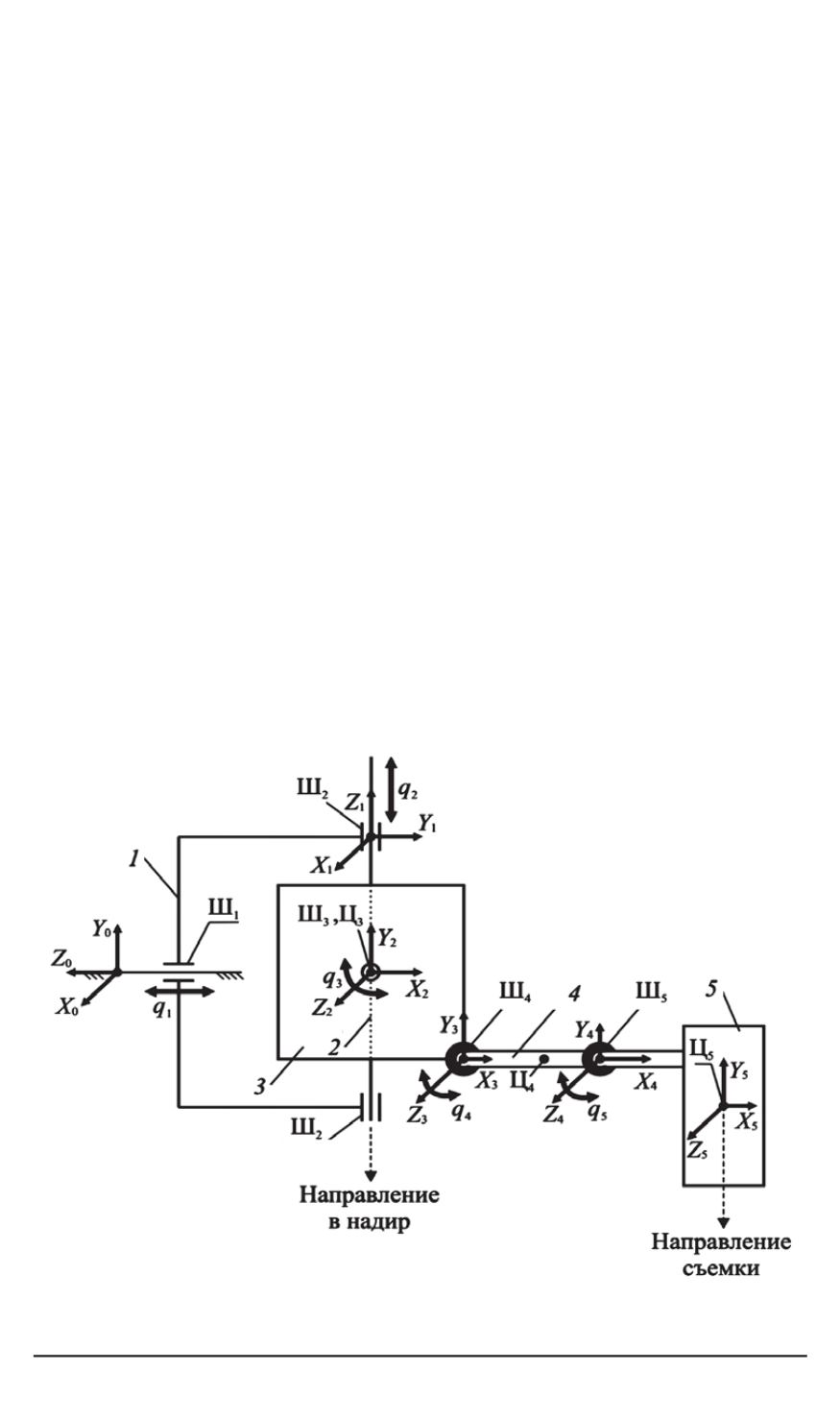
тривается в плоскости, перпендикулярной траектории полета. Эквива-
лентная кинематическая схема такой системы представляется как не-
который механизм (рис. 1), состоящий из пяти звеньев, сочлененных
последовательно. Движение звеньев механизма описывается с помо-
щью обобщенных координат:
q
1
и
q
2
— линейные перемещения КА
в направлении взаимно перпендикулярных осей в плоскости;
q
3
,
q
4
и
q
5
— вращение КА и звеньев поворотного механизма соответственно.
При этом геометрические и инерционные параметры поступательно
перемещающихся звеньев принимаются нулевыми. На рис. 1 приняты
следующие обозначения: Ш
1
, Ш
2
, Ш
3
и Ш
4
, Ш
5
— сочленения меха-
Рис. 1. Эквивалентная кинематическая схема системы КА + двухзвенный пово-
ротный механизм
42 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 3


