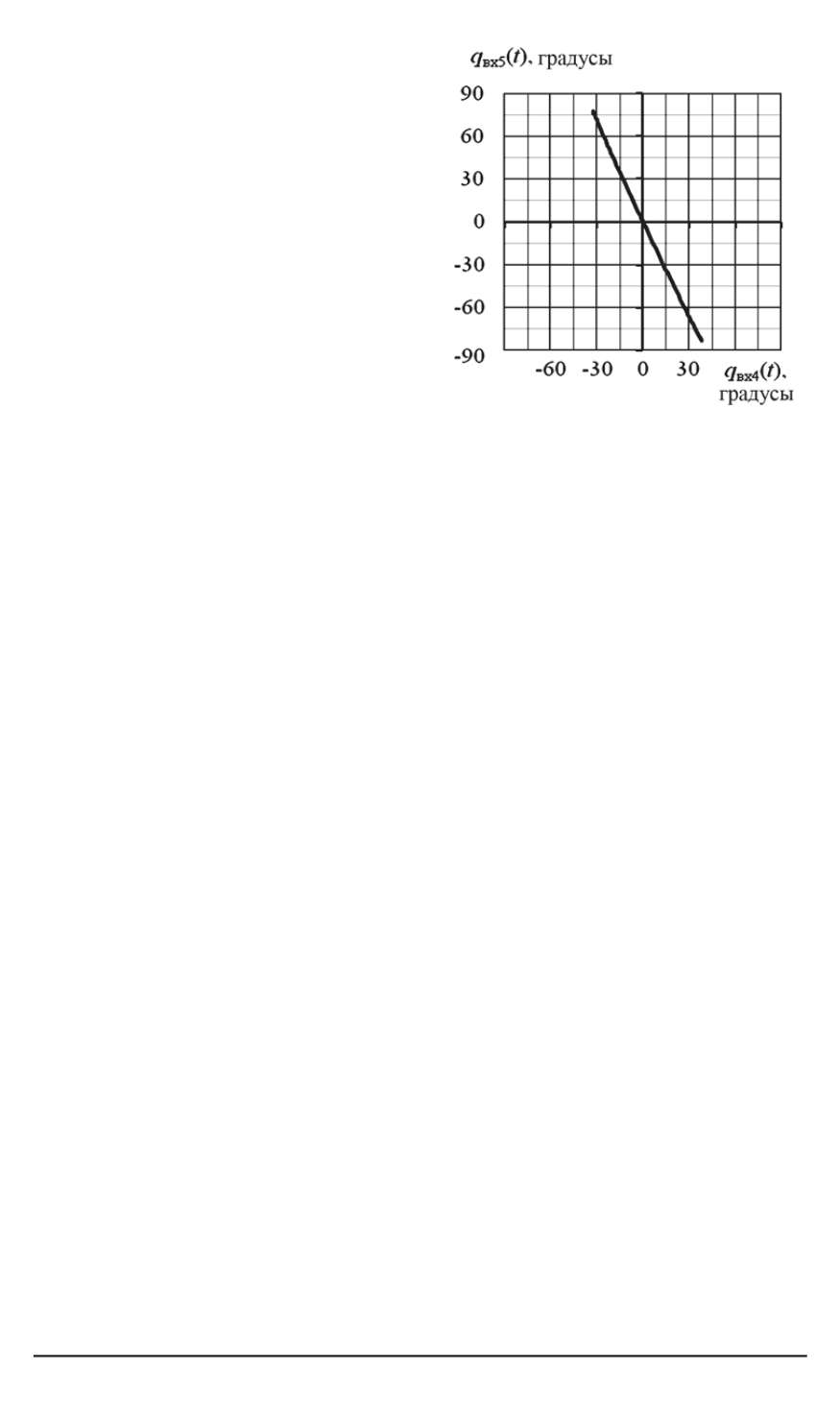
Рис. 2. Плановая траектория движе-
ния двухзвенного механизма (изокли-
на нулевых возмущений)
Результаты численного моде-
лирования.
Далее в качестве при-
мера приведены результаты мо-
делирования процессов наведения
камеры с помощью двухзвенно-
го механизма. Основание (КА) по-
лагается свободным. Моделирова-
ние проводилось с использовани-
ем разработанного авторами про-
граммного обеспечения, реализую-
щего расчет программных траекто-
рий (9) и численное интегрирова-
ние системы нелинейных диффе-
ренциальных уравнений (1). Закон
движения камеры был задан сину-
соидой
β
∗
оу
=
A
β
sin(
ωt
)
с ампли-
тудой
A
β
= 45
◦
и частотой
ω
= 0
,
45
c
−
1
. Такие параметры соответ-
ствуют динамическим характеристикам наведения, близким к требуе-
мым. Геометрические и инерционные параметры системы приведены в
табл. 1. В качестве двигателей приводов рассматривались шаговые
двигатели [11], учитывались механические свойства муфт и редук-
торов.
Результаты моделирования, представленные на рис. 3, подтвержда-
ют принципиальную возможность компенсации (за счет надлежащего
выбора траекторий движения поворотного механизма) влияния про-
цессов наведения камеры на ориентацию КА. Наведение камеры по
заданной траектории осуществляется посредством синхронного, про-
тивоположно направленного движения звеньев механизма по вычи-
сленным ранее траекториям. Максимальные возмущения КА не пре-
вышают
0
,
5
◦
.
Для сравнения на рис. 4 приведены результаты моделирования дви-
жения камеры и возмущений КА при использовании одностепенного
поворотного механизма. При поворотах камеры на углы
40
◦
угловые
возмущения КА составляют
27
◦
. Для движения камеры в базовой СК
по синусоидальному закону с амплитудой
40
◦
амплитуда вращения
камеры относительно КА составляет
67
◦
.
Выбор рабочей зоны двухзвенного механизма.
Проведенные ис-
следования динамики системы при различных параметрах позволили
выявить ряд важных особенностей, которые необходимо учитывать
при разработке систем наведения на основе многозвенных механиз-
мов. Первая особенность связана с тем, что параметры законов дви-
жения зависят от соотношений геометрических и инерционных пара-
метров звеньев поворотного механизма. Для достижения камерой за-
данных углов наведения в ряде случаев могут потребоваться слишком
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 3 47


