большие относительные перемещения звеньев механизма. Это отрица-
тельно скажется на свойствах конструкции поворотного механизма и
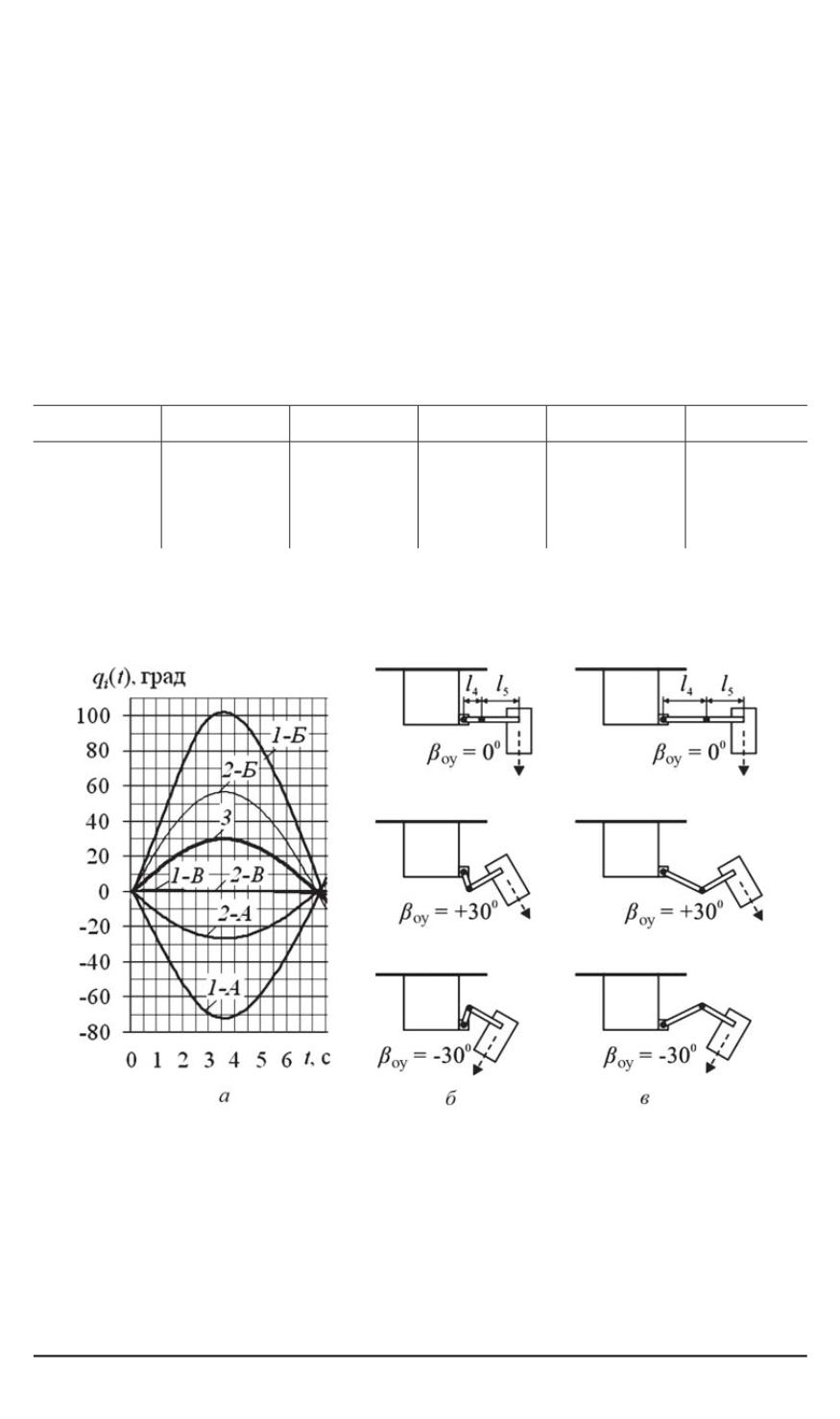
необходимых энергетических затратах. Так, при значениях инерцион-
ных параметров, приведенных в табл. 1, и геометрических параметрах
системы, приведенных в табл. 2 (длины звеньев механизма
l
4
= 0
,
2
м и
l
5
= 0
,
4
м), относительные перемещения звеньев при повороте камеры
на угол
β
∗
оу
= +30
◦
составляют
q
вх4
=
−
72
◦
,
q
вх5
= +102
◦
(кривые
1-А
и
1-Б
, см. рис. 5). Перемещения звеньев в таком диапазоне недопустимо
велики, так как могут привести к соударению звена
4
с корпусом КА.
Таблица 2
Геометрические параметры системы наведения при симметричном
закреплении камеры
l
3
, м
l
4
, м
l
5
, м
r
3
, м
r
4
, м
r
5
, м
⎡
⎢⎢⎣
+0
,
4
−
0
,
4
0
,
0
⎤
⎥⎥⎦
⎡
⎢⎢⎣
+0
,
2
0
,
0
0
,
0
⎤
⎥⎥⎦
⎡
⎢⎢⎣
+0
,
4
0
,
0
0
,
0
⎤
⎥⎥⎦
⎡
⎢⎢⎣
−
0
,
4
+0
,
4
0
,
0
⎤
⎥⎥⎦
⎡
⎢⎢⎣
−
0
,
01
0
,
0
0
,
0
⎤
⎥⎥⎦
⎡
⎢⎢⎣
0
,
0
0
,
0
0
,
0
⎤
⎥⎥⎦
Приведенный на рис. 5 пример иллюстрирует возможность умень-
шения диапазонов перемещения 4-го и 5-го звеньев путем надлежа-
Рис. 5. Относительные перемещения звеньев поворотного механизма при раз-
ных соотношениях их длин:
а
— графики изменения обобщенных координат вращательных звеньев системы в
зависимости от времени;
б
— кинематические эскизы системы при
l
4
= 0
,
2
м,
l
5
= 0
,
4
м;
в
— кинематические эскизы системы при
l
4
= 0
,
5
м,
l
5
= 0
,
4
м;
1-А
,
1-Б
,
1-В
— движение поворотного механизма (
q
4
(
t
)
и
q
5
(
t
)
) и возмущения КА (
q
3
(
t
)
)
при
l
4
= 0
,
2
м,
l
5
= 0
,
4
м;
2-А
,
2-Б
,
2-В
— движение поворотного механизма (
q
4
(
t
)
и
q
5
(
t
)
) и возмущения КА (
q
3
(
t
)
) при
l
4
= 0
,
5
м,
l
5
= 0
,
4
м;
3
— заданный закон
вращения камеры
β
∗
оу
(
t
)
в базовой СК
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 3 49


