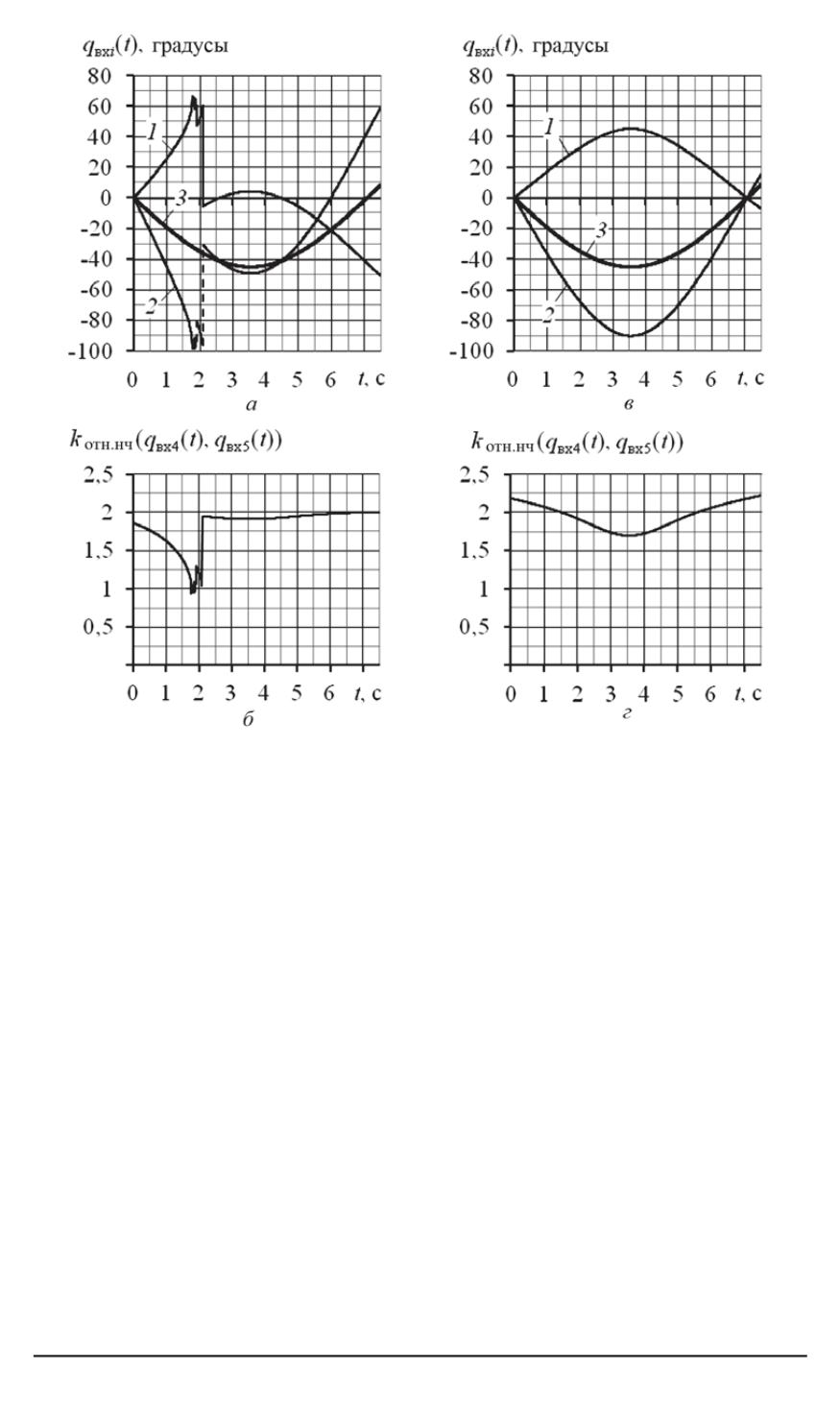
Рис. 6. Формирование плановых траекторий поворотного механизма при
разных соотношениях длин звеньев:
а
и
в
— результаты построения плановых траекторий при
l
4
= 0
,
5
м и
0
,
65
м;
б
и
г
— изменение коэффициента относительных приращений при движении звеньев по
изоклине при
l
4
= 0
,
5
м и
0
,
65
м;
1
и
2
— плановые траектории 4-го и 5-го звеньев
(
q
вх
4
(
t
)
и
q
вх
5
(
t
)
) соответственно для движения по изоклине;
3
— заданный закон
вращения камеры
β
∗
оу
(
t
)
в базовой СК
двухзвенного механизма, при которых исключается попадание рассчи-
танной точки траектории в данные области.
При этом влиянием координаты
q
3
пренебрегаем.
Исходя изэтого, предлагается определять границы сингулярных
областей в исходном положении системы (
q
i
= 0
,
i
= 1
. . .
5
) как пере-
сечение поверхности
Z
D
(
q
вх4
, q
вх5
) =
D
124
(
q
вх4
, q
вх5
)
−
D
125
(
q
вх4
, q
вх5
)
с плоскостью
Z
(
q
вх4
, q
вх5
) = 0
. В качестве примера на рис. 7,
а
для па-
раметров системы, указанных в табл. 1, и при длине 4-го звена, равной
0,5 м, показано построение такой поверхности и определение границ
возникновения сингулярностей.
При пересечении изоклиной данных границ происходит наруше-
ние ее непрерывности (рис. 7,
б
и
в
). Увеличение длины 4-го звена
при выбранной длине 5-го звена приводит к уменьшению областей
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 3 51


