














 5 / 16
5 / 16

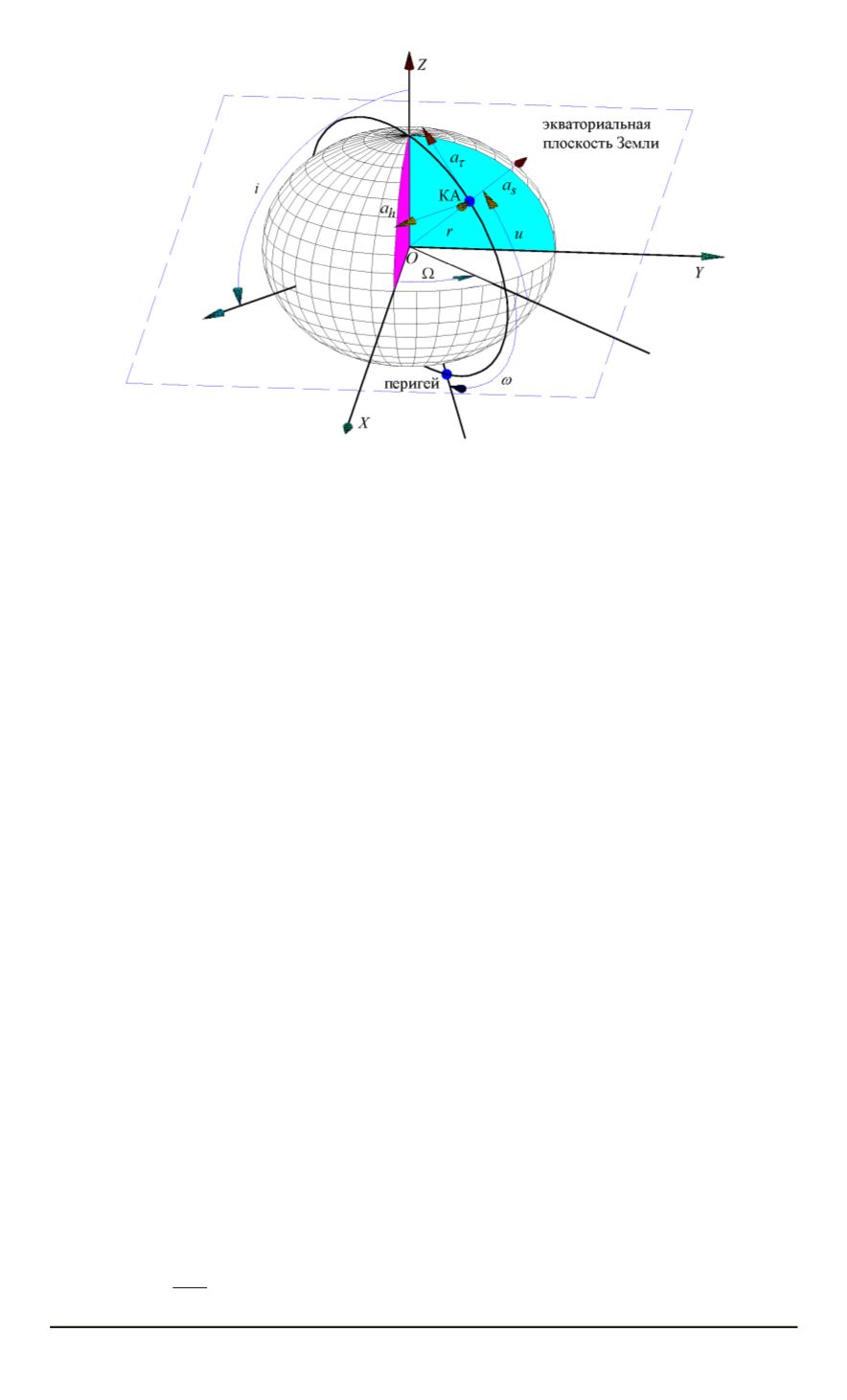
Рис. 1. Корректируемые элементы орбиты и управляющие ускорения
устанавливаются шесть двигателей, действующих по положительным
и отрицательным направлениям трех осей координат. Обозначим век-
тор управляющего ускорения
a = (
a
τ
, a
s
, a
h
)
, где
a
τ
— составляющая
управляющего ускорения по направлению скорости КА;
a
s
— составля-
ющая управляющего ускорения, перпендикулярная вектору скорости
КА и расположенная в плоскости орбиты (положительное направление
от Земли);
a
h
— составляющая управляющего ускорения по нормали к
плоскости орбиты (рис. 1).
Если пренебречь текущими изменениями элементов орбиты вну-
три витка и добиваться только устранения вековых уходов элементов
орбиты (накапливающихся от витка к витку), можно ограничиться по-
строением управляющих воздействий, компенсирующих только усред-
ненные по витку возмущающие воздействия. В этом случае движение
КА целесообразно описывать средними элементами орбиты, которые
легко получаются из соотношений между средними и оскулирующими
элементами.
Для поддержания одинаковых условий съемки подстилающей по-
верхности, а также для изотрассовой периодичности прохождения КА,
выбираем корректируемые параметры
X = (
a, λ
Ω
,
Ω
, i
)
т
, где
a
— боль-
шая полуось;
λ
Ω
— географическая долгота восходящего узла;
Ω
—
долгота восходящего узла;
i
– наклонение орбиты.
Уравнения движения центра масс КА в средних элементах
X
для
орбит с малыми эксцентриситетами имеют вид [10, 12]
d
X
dt
=
f
(
t,
X(
t
)) +
B
(
t,
X(
t
))a(
t
)
,
X(
t
0
) = X
0
,
(2)
72 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2015. № 2