Рис
. 6.
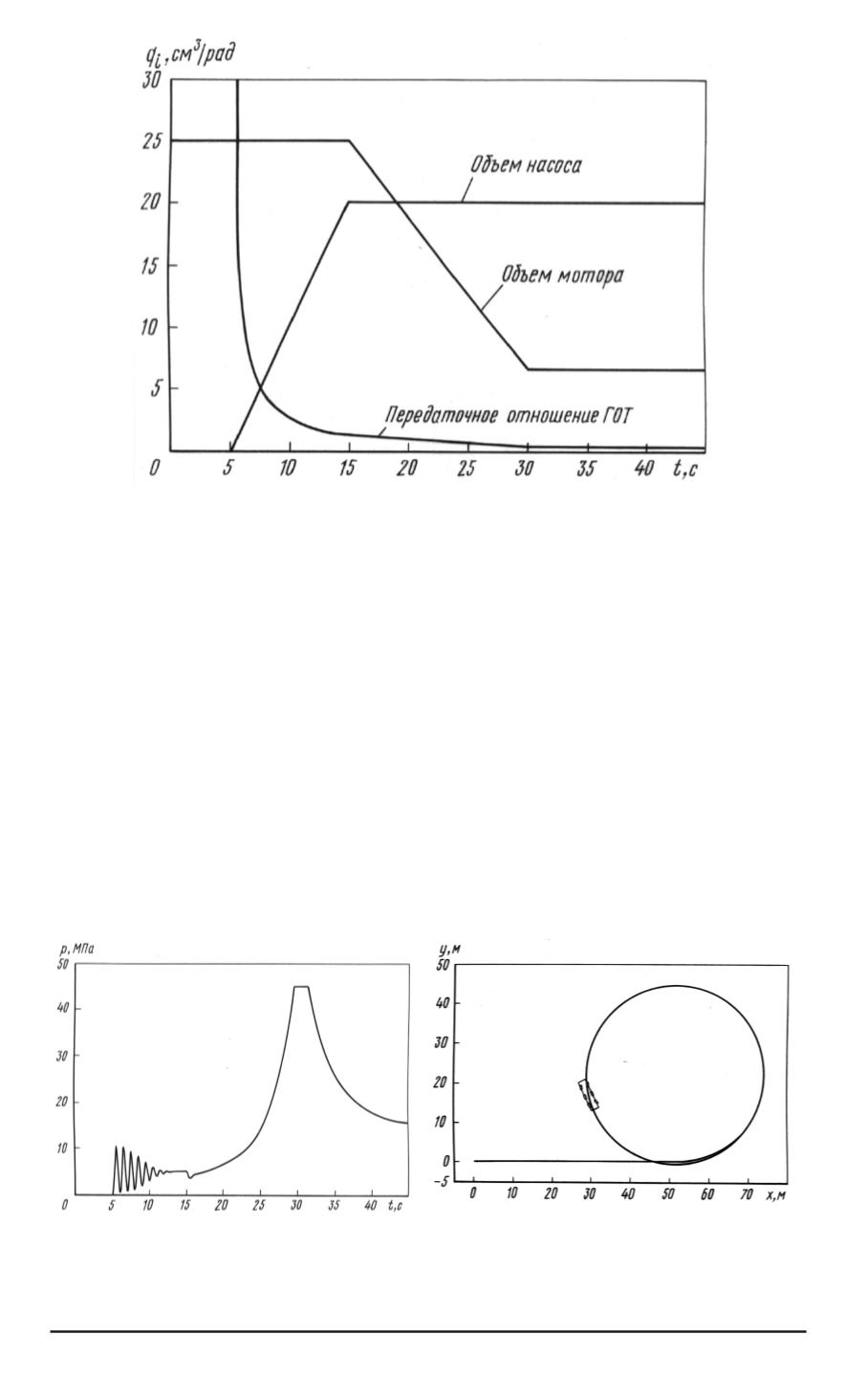
Рабочие объемы машин
φ
= 0
,
3
рад
= 18
◦
.
На рис
. 8
приведена траектория движения машины
во время выполнения маневра
.
Установившийся угол увода
φ
= 0
,
177
рад
= 10
,
14
◦
.
Во время поворота трансмиссия не регулируется
.
Изменение давле
-
ния рабочей жидкости в магистралях ГОТ показано на рис
. 9.
Моменты на колесах показаны на рис
. 10.
На рис
. 11
показано изме
-
нение скорости центра масс машины во время выполнения маневра
.
Предлагаемая математическая модель может быть использована
для синтеза системы автоматического управления
,
а также для иссле
-
дования управляемости и устойчивости транспортного средства при
Рис
. 7.
Давление в приводе
Рис
. 8.
Траектория движения машины
во время маневра
12 ISSN 0236-3941.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Машиностроение
”. 2004.
№
4


