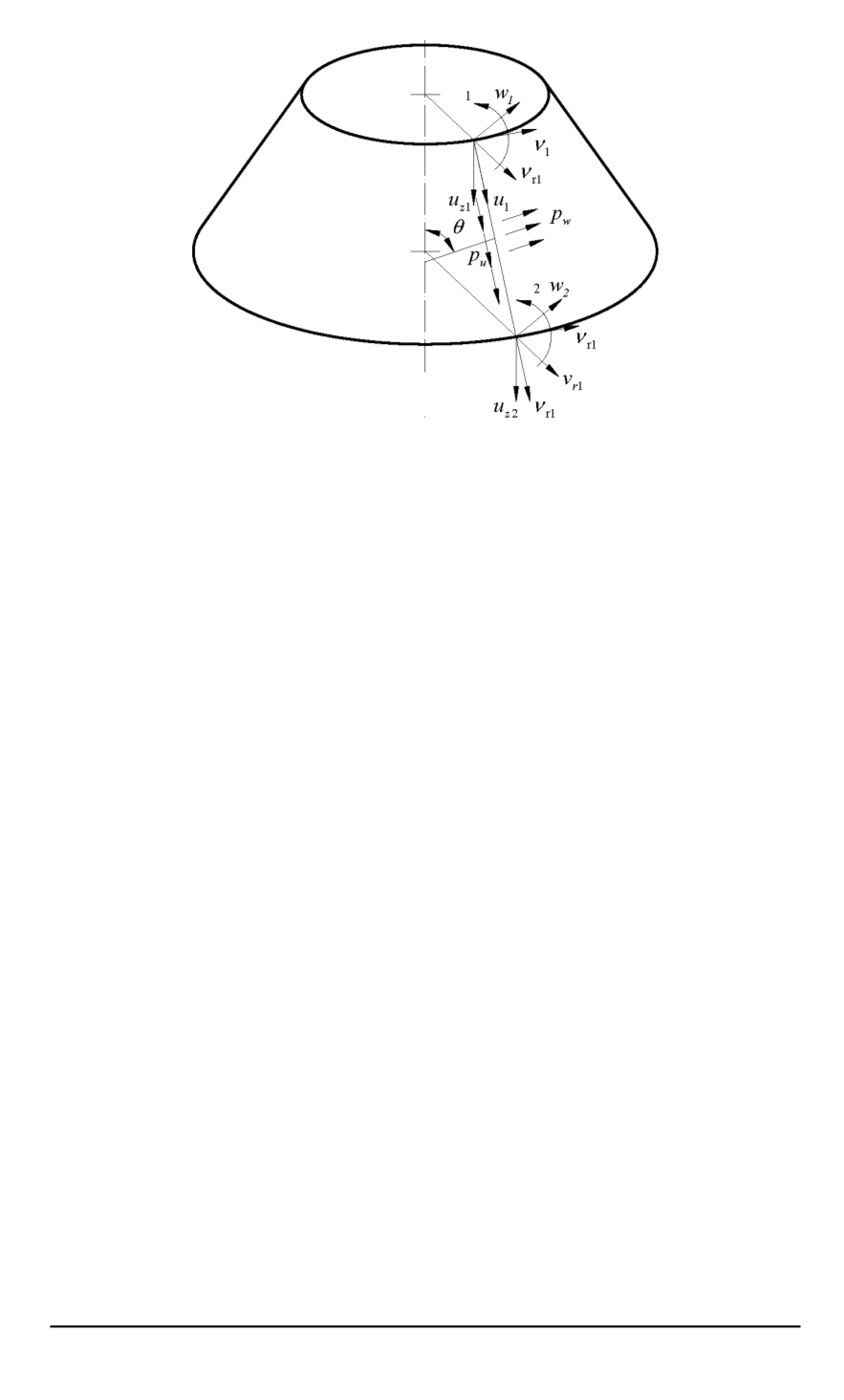
Рис. 5. Конечный элемент с распределенными силами
образом:
u
w
v
=
1
x
0 0 0 0 0 0
0 0 1
x x
2
x
3
0 0
0 0 0 0 0 0 1
x
a;
a = [
a
1
, a
2
, a
3
, a
4
, a
5
, a
6
, a
7
, a
8
]
т
,
где
a
— матрица коэффициентов аппроксимации. Эти коэффициенты
не имеют наглядного геометрического представления и в дальнейшем
от этих коэффициентов перейдем к глобальным степеням свободы
узлов.
Согласно соотношениям (3), аппроксимируя перемещения (4), по-
лучаем
ε
= LU = LΦa = Ba
,
(5)
где
B = LΦ =
=
d
/
dx
0
0
c
r
s
r
0
0
0
−
c
r
+
d
/
dx
0
−
d
2
dx
2
0
−
s
r
c
r
−
s
2
r
−
c
r
d
/
dx
0
0
0
−
2
s
r
c
r
+ 2
s
r
d
/
dx
1
x
0 0 0 0 0 0
0 0 1
x x
2
x
3
0 0
0 0 0 0 0 0 1
x
=
=
0
1 0
0
0
0
0
0
c
r
c
r
x s
r
s
r
x
s
r
x
2
s
r
x
3
0
0
0
0 0
0
0
0
−
c
r
−
c
r
x
+ 1
0
0 0
0
−
2
−
6
x
0
0
−
s
r
c
r
−
s
r
c
r
x
−
s
2
r
−
s
r
x
2
−
c
r
−
s
2
r
x
2
−
2
c
r
x
−
s
2
r
x
3
−
3
c
r
x
2
0
0
0
0 0
0
0
0
−
2
s
r
c
r
−
2
s
r
c
r
x
+ 2
s
r
.
80 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 1


