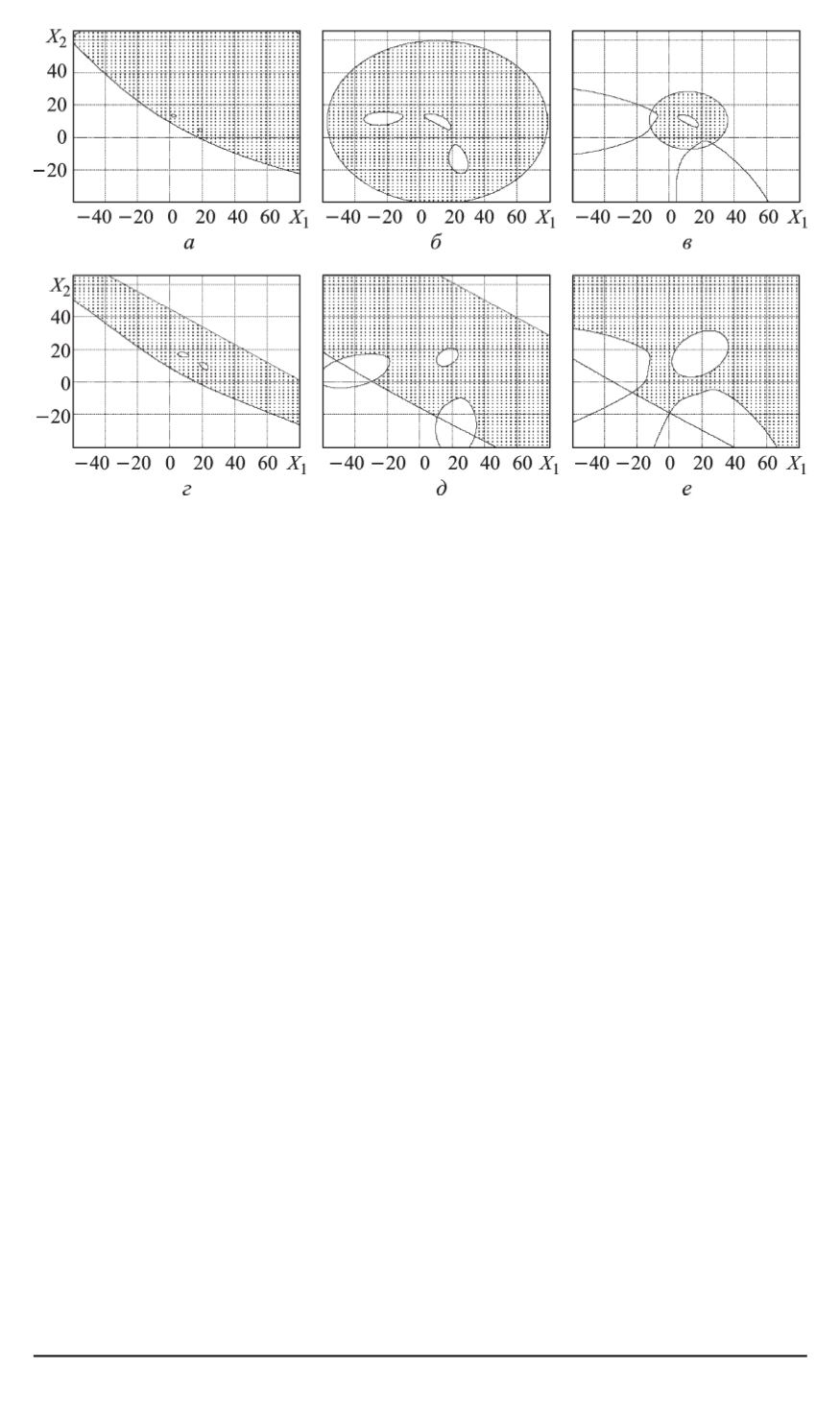
Рис. 7. Влияние коэффициента усиления системы управления на положение
границ устойчивости системы:
K
ψ
= 0
,
1
(
а,г
); 1,0 (
б,д
); 2,5 (
в,е
);
κ
= 1
(
а–в
); 5 (
г–е
)
В случае
κ
= 5
(рис. 7,
г–е
) увеличение
K
ψ
также приводит к по-
нижению нижнейграницы устойчивости до определенного уровня и
увеличению внутренних областейнеустойчивости, соответствующих
частотам колебанийжидкости. Кроме того, с ростом коэффициента
усиления СУ происходит смещение вверх апериодической(верхней)
границы устойчивости и расширение внутренней области неустойчи-
вости, соответствующейчастоте перехода через
ϕ
= 0
ФЧХ автомата
стабилизации.
Заключение.
Как следует из проведенного анализа, зависимость
положения границ асимптотическойустойчивости системы от пара-
метров компоновки, т.е. от координат баков с топливом, существенно
изменяется при различных соотношениях полных и колеблющихся
масс топлива в баках.
Главным отличием областей, построенных для случаев
κ
≈
1
,
κ
≈
1
,
1
. . .
1
,
4
и
κ >
4
является характер границы устойчивости, соот-
ветствующейпереходу через нуль ФЧХ автомата стабилизации. Если
практически вся масса топлива участвует в колебаниях, то она пред-
ставляет собойвнешнюю границу устойчивости, то в случае больших
соотношениймасс, она, наоборот, является внутреннейобластью не-
устойчивости. Кроме того, в определенном диапазоне отношений пол-
ных и колеблющихся масс возникновение неустойчивости системы в
районе этой частоты при типовых параметрах автомата стабилизации
невозможно.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 4 15


