














 9 / 14
9 / 14

Планирование, моделирование и экспериментальное исследование манипуляционной операции
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
65
1
ст
сх ст
ст
,
1, ,4.
i
i
Р q q hР l
q q l i
Поскольку палец схвата неподвижен относительно схвата в процессе вы-
полнения операции, то ориентация пальца и ориентация схвата относительно
инерциальной СК одинаковы и могут быть заданы кватернионом
,
sin(1,57 / 2); 0,0; 0,0;
( cos 1,57 2)/ .
q q q q
С помощью кватерниона
q
изменение ориентации, описываемое
,
q
до-
полняется последующим поворотом на 1,57 рад вокруг оси
Ox
CК, в которой
задана исходная траектория. Это необходимо сделать, потому что система коор-
динат схвата задана таким образом, что ее ось
Oz
направлена вдоль пальцев, а
ось
Oy
— параллельна нормали меньшей грани базы схвата. Таким образом,
введение кватерниона
q
обеспечивает желаемую ориентацию схвата в процес-
се открытия клапана сумки в каждой точке рассчитанной траектории движения.
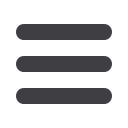
Экспериментальные исследования.
По алгоритмам, описанным в настоя-
щей работе, выполнена серия экспериментов по автоматическому открыванию
клапана сумки при различных исходных положениях ОМ относительно МР. В
каждом эксперименте изменяли параметры траекторий перемещения в исход-
ное положение, а также ориентацию и положение сумки относительно основа-
ния МР. Однако законы перемещения инструмента по ломаной линии остава-
лись неизменными. Изменялись только параметры привязки шаблона, его мас-
штаб и ориентация.
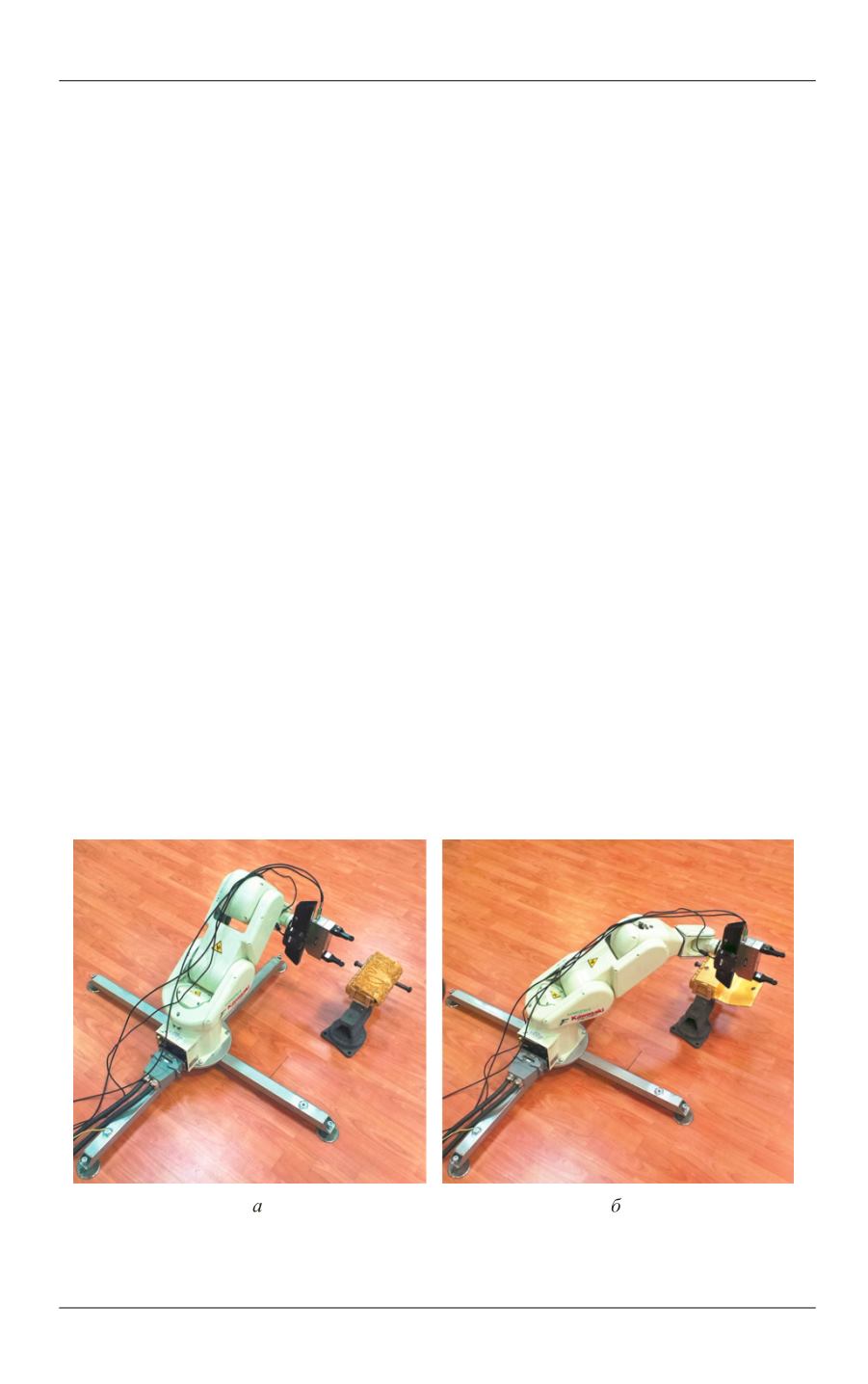
Фотографии этапов выполнения операции приведены на рис. 7. Графики
изменения координат схвата на первом этапе выполнения операции, когда ма-
нипулятор МР переходит из исходного положения в положение обзора, показа-
Рис. 7.
Переход МР в начальную точку траектории (
а
) и открывание сумки (
б
)