














 7 / 14
7 / 14

Планирование, моделирование и экспериментальное исследование манипуляционной операции
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
63
4. Графический интерфейс пользователя, созданный на базе ROS [8] с ис-
пользованием инструментов Rviz [10] и Interactive markers [11]. С его помощью
оператор может задавать габаритные размеры клапана и направление подхода
МР, наблюдать виртуальную рабочую сцену, подтверждать правильность спла-
нированной траектории и отправлять ее на исполнение реальному МР. Вирту-
альная рабочая сцена с размещенными на ней трехмерными моделями МР и
ОМ и элементами управления графического интерфейса приведена на рис. 4.
5. Программа расчета координат точек траектории движения схвата и его
ориентации при выполнении операции открывания сумки.
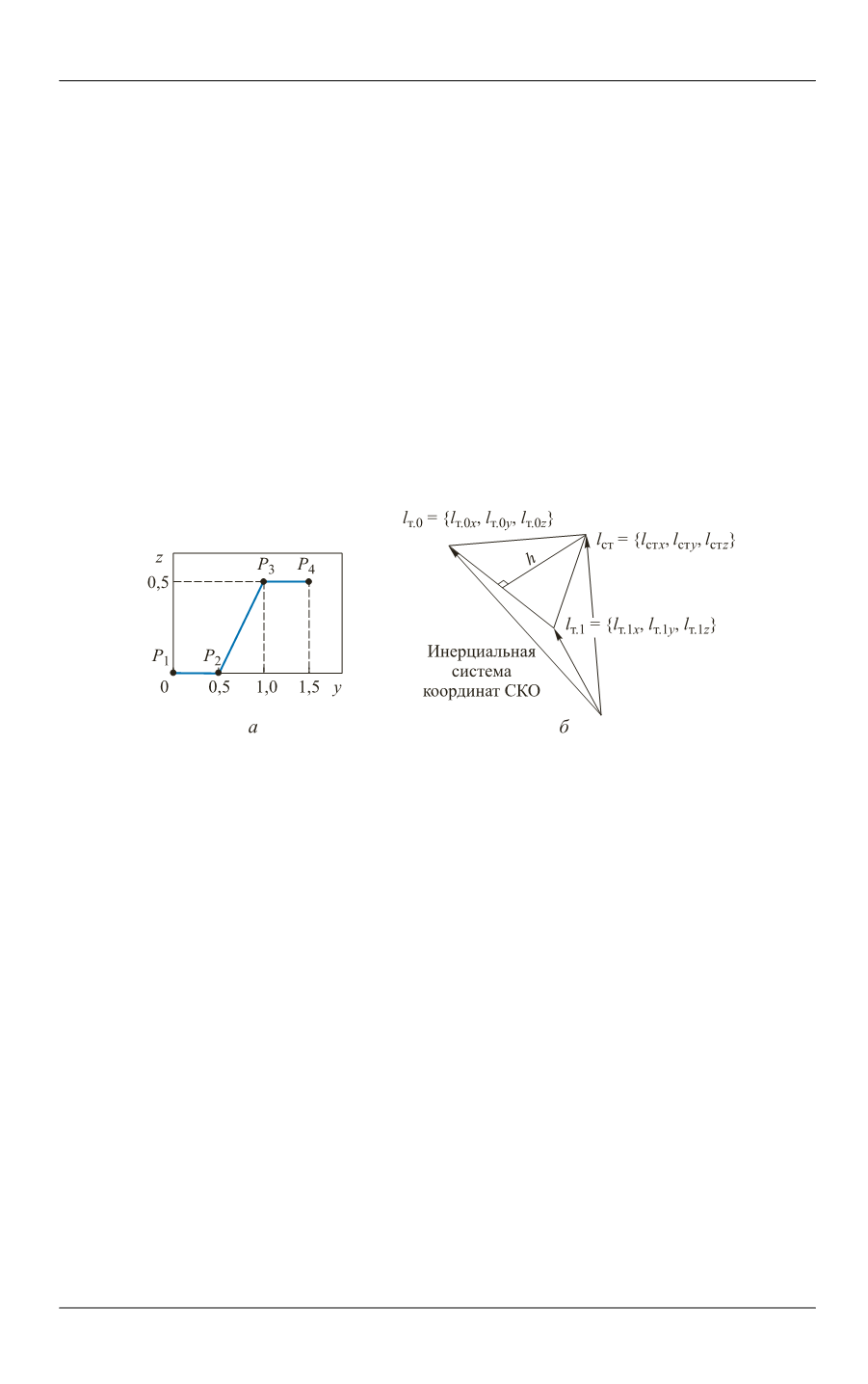
Алгоритмы программы иллюстрирует рис. 6. На рис. 6,
а
показан шаблон
траектории движения конца пальца схвата МР при выполнении операции от-
крывания сумки. На рис. 6,
б
приведена расчетная схема определения масштаба,
положения и ориентации траектории пальца схвата для выполнения операции
открытия магнитного замка.
Точки траектории шаблона имеют следующие координаты:
Р
1
=
= {0,0; 0,0; 0,0};
Р
2
= {0,0; 0,5; 0,0};
Р
3
= {0,0; 1,0; 0,5};
Р
4
= {0,0; 1,5; 0,5}.
Программа расчета координат точек траектории движения схвата в
6-мерном пространстве в качестве исходных данных получает вектор положе-
ния конца стрелки в инерциальной системе координат (СК)
l
ст
= {
l
ст
х
,
l
ст
у
,
l
ст
z
},
его ориентацию, заданную кватернионом поворота из инерциальной СК в СК,
связанную со стрелкой,
q
ст
= {
q
ст
х
,
q
ст
у
,
q
ст
z
,
q
ст
w
}, и векторы положений двух
точек, задающих линию перегиба клапана сумки в инерциальной СК,
l
т.0
= {
l
т.0
х
,
l
т.0
у
,
l
т.0
z
} и
l
т.1
= {
l
т.1
х
,
l
т.1
у
,
l
т.1
z
} соответственно (см. рис. 6,
б
).
По этим параметрам выполняется автоматический перерасчет координат
точек шаблона траектории в трехмерные координаты. При этом осуществляют-
ся следующие действия.
Масштабирование шаблона траектории.
Координаты конца маркера-
стрелки
ст
l
и точечных маркеров
т.0
l
и
т.1
l
определяют положение плоскости
клапана сумки. Ширина клапана
h
вычисляется как расстояние от конца марке-
ра-стрелки до линии перегиба клапана:
Рис. 6.
Шаблон траектории движения инструмента (
а
) и расчетная схема
определения параметров траектории пальца схвата (
б
)