














 11 / 14
11 / 14

Планирование, моделирование и экспериментальное исследование манипуляционной операции
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
67
Заключение.
Предложен способ формализации действий МР с ОМ на ос-
нове программирования законов перемещения инструмента с использованием
шаблона траектории. При этом оператор, используя разработанные графиче-
ские средства интерфейса и шаблон, на этапе планирования формирует траек-
торию (показывает движение) МР на виртуальной сцене, сформированной СТЗ.
Для этого оператор изменяет только параметры шаблона ломаной линии, вы-
полняя тем самым настройку (привязку) параметров траектории к конкретным
условиям. Использование для планирования шаблона позволяет (помимо реа-
лизации функции показа) упростить и сделать процедуру планирования
наглядной для оператора.
Траектории перемещения МР в свободной зоне, а также захват объекта ма-
нипулятором планируются и выполняются полностью автоматически.
Результаты экспериментов подтвердили правильность предложенного под-
хода к планированию движений МР, а также алгоритмических и технических
решений.
Сформулированные предложения и разработанное ПО могут быть исполь-
зованы для автоматизации других роботизированных операций, подобных от-
крыванию сумки на магнитном замке.
ЛИТЕРАТУРА
1.
Аппаратно-программный
комплекс для решения задач автоматического захвата объ-
екта манипуляторами / А.Г. Лесков, В.В. Илларионов, И.А. Калеватых, С.Д. Морошкин,
К.В. Бажинова, Е.В. Феоктистова // Инженерный журнал: наука и инновации. 2015.
Вып. 1. DOI:
10.18698/2308-6033-2015-1-1361 URL:
http://engjournal.ru/catalog/pribor/robot/1361.html
2.
Manschitz S., Kober J., Gienger M., Peters J
. Learning to unscrew a light bulb from demon-
strations // In Proc. 41st International Symposium on Robotics. Germany, Munich, 2014,
2–3 June. Р. 11–17.
3.
Li Z., Xia Z., Hu Y., Zhang J
. An improved framework for robotic door-opening task using
kinect and tactile information // In Proc. 11th World Congress on Intelligent Control and
Automation, Australia, Shenyang, 2014, 29 June – 4 July. Р. 2219–2224.
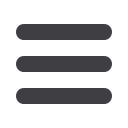
Рис. 9.
График изменения силы на очувствленном пальце схвата в процессе
раскрытия сумки