














 10 / 14
10 / 14

А.Г. Лесков, В.В. Илларионов, И.А. Калеватых
66
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
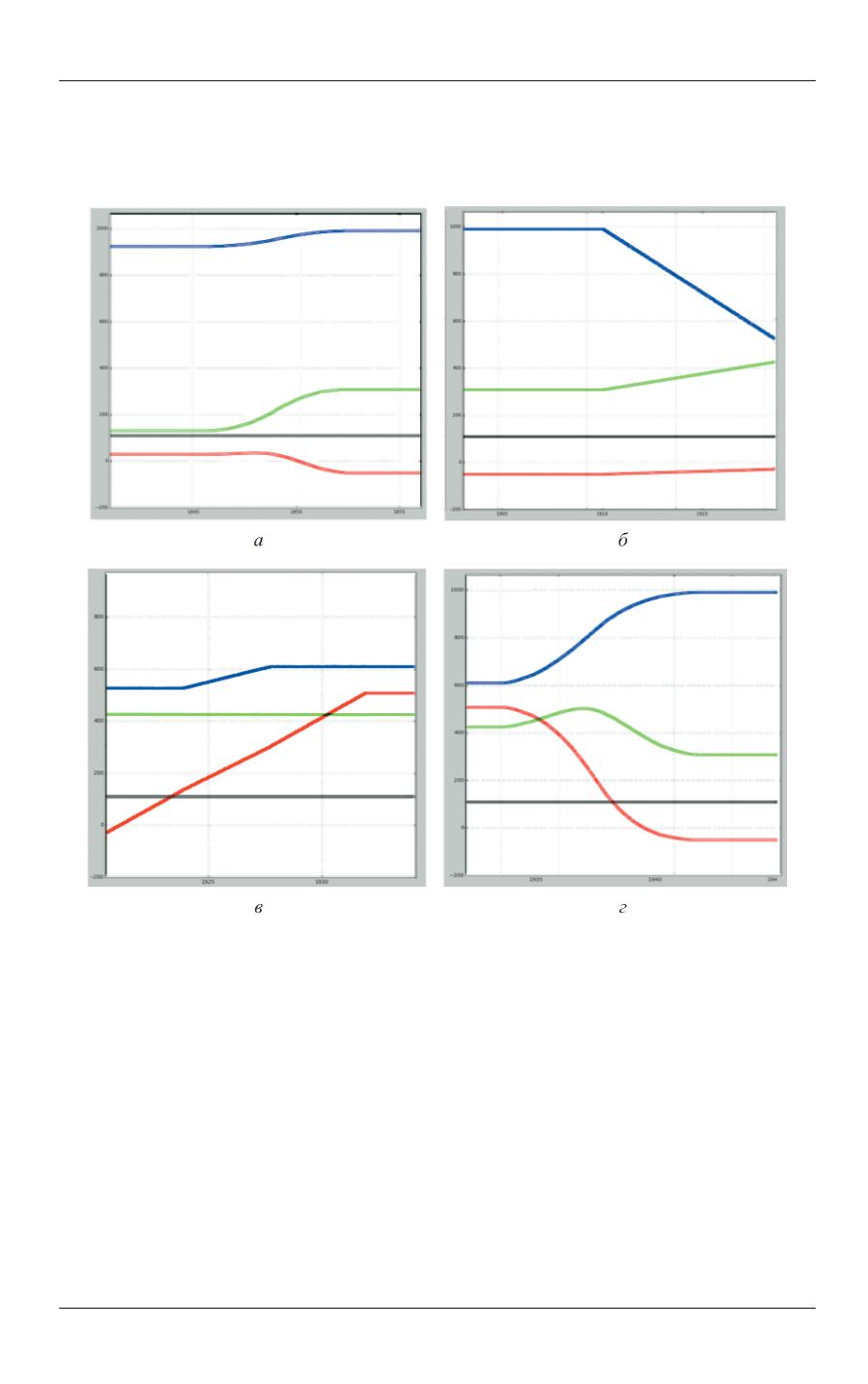
ны на рис. 8,
а
. Изменение декартовых координат схвата в процессе выхода МР
в первую точку траектории перемещения при выполнении операции раскрытия
клапана сумки (движение по участку
P
2
P
3
ломаной) иллюстрирует рис. 8,
б
.
Рис. 8.
График изменения линейных координат схвата МР при выполнении операции
раскрытия сумки
Видно, как МР отрабатывает рассчитанную по шаблону траекторию
(рис. 8,
в
). Финальный этап выполнения операции, на котором МР возвращает-
ся в точку обзора, приведен на рис. 8,
г
.
На рис. 9 приведен график изменения силы, измеренной датчиком очув-
ствленного пальца схвата во время выполнения операции. Сила (график зеле-
ного цвета) направлена перпендикулярно плоскости пальца схвата. Размерно-
сти оси абсцисс — секунды, оси ординат — ньютоны. График изменения силы
подтверждает, что механический контакт пальца схвата МР с объектом мани-
пулирования произошел точно в момент начала прохождения пальцем лома-
ной линии.