














 4 / 14
4 / 14

А.Г. Лесков, В.В. Илларионов, И.А. Калеватых
60
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
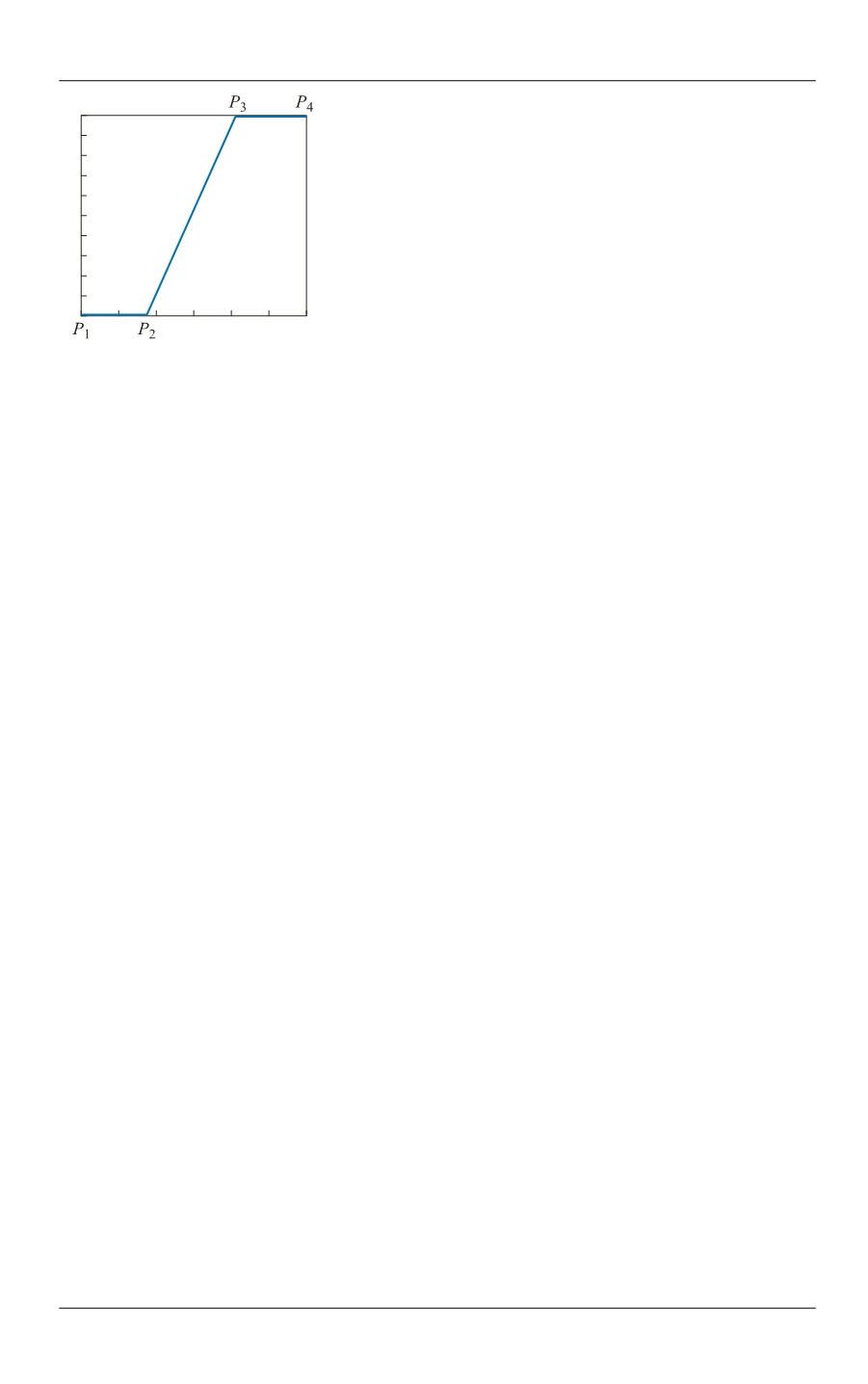
Ломаная
P
1
P
2
P
3
P
4
является формальным отра-
жением приема открытия сумки, описанного ранее.
Далее будет показано, что эта ломаная может быть
использована в качестве шаблона для расчета тра-
ектории движения реального инструмента.
Алгоритм открывания клапана сумки робо-
том.
Эта операция включает в себя следующий
набор последовательно выполняемых шагов.
Шаг 1. Планирование траектории перехода МР
в точку обзора.
Вначале робот переводится в точку
обзора, которая выбирается так, чтобы оператор
мог в окне виртуальной сцены видеть положение
сумки. Изображение формируется камерой СТЗ,
размещенной на схвате МР.
Траектория планируется с учетом достижимости точки обзора при условии
исключения самопересечения звеньев МР и отсутствия контакта с посторонни-
ми объектами, находящимися в рабочей зоне, а также автоматически, без вме-
шательства оператора.
Шаг 2. Перемещение МР по спланированной траектории в точку обзора.
Перед этой операцией выполняется моделирование движения МР с отрисовкой
движения на мониторе. Моделирование позволяет контролировать правиль-
ность планирования. Если моделирование завершается успешно, то оператор
инициирует перемещение реального МР в точку обзора.
Когда манипулятор достигает точки обзора, ПО АПК включает СТЗ, по ин-
формации которой ПО формирует изображения и определяет координаты рас-
положения объектов и точек на их поверхностях относительно системы коор-
динат основания.
Следующие два шага выполняются в интерактивном режиме. Оператор, ис-
пользуя пульт человеко-машинного интерфейса, на экране монитора «показыва-
ет», как должен перемещаться схват робота при открывании сумки, а также с по-
мощью разработанных средств графического интерфейса указывает линии пере-
гиба клапана, положение первой точки на траектории раскрытия сумки и направ-
ление подвода инструмента под клапан. По этим данным рассчитываются реаль-
ные параметры шаблона траектории: положение в рабочей зоне, ориентация в со-
ответствии с ориентацией сумки и линейные размеры, соответствующие размерам
клапана, который требуется открыть. В качестве инструмента для открытия ис-
пользуется один из пальцев двупалого схвата в его раскрытом состоянии.
Шаг 3. Задание оператором координат линии перегиба клапана сумки и
вектора подхода.
Для выполнения этого шага на виртуальной сцене рядом с ро-
ботом и сумкой программы разработанного ПО отображают графические эле-
менты (две точки и стрелку), положение и ориентацию которых можно изме-
нять (на рис. 4 показаны розовым цветом).
Рис. 3.
Ломаная линия
(шаблон) траектории пере-
мещения инструмента