














 3 / 14
3 / 14

Планирование, моделирование и экспериментальное исследование манипуляционной операции
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
59
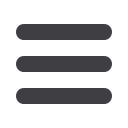
Рис. 1.
Объект манипулирования (
а
) и аппаратная часть комплекса (
б
)
Общее описание алгоритма от-
крывания сумки и основы его форма-
лизации.
Наиболее простой способ
открыть такую сумку — подложить
инструмент, например широкую рейку,
под клапан, затем приподнять рейку с
одновременным
перемещением
в
направлении откидывания клапана,
после этого переместить рейку в сво-
бодную зону.
Закон движения инструмента при
таком способе открывания удобно
формализовать, вводя в рассмотрение
некоторую плоскую ломаную линию.
Линия состоит из трех прямолиней-
ных отрезков, соответствующих эта-
пам перемещения линейки под клапан, откидывания клапана и перемещения в
свободную зону (рис. 3).
Плоскость, в которой расположена ломаная, устанавливается перпендику-
лярно по отношению к линии перегиба (шарниру) клапана. Точка
P
1
на рис. 3
соответствует точке на откидывающейся кромке клапана, под которую подво-
дится рейка. Отрезок
P
1
P
2
определяет направление перемещения рейки при
подсовывании под клапан.
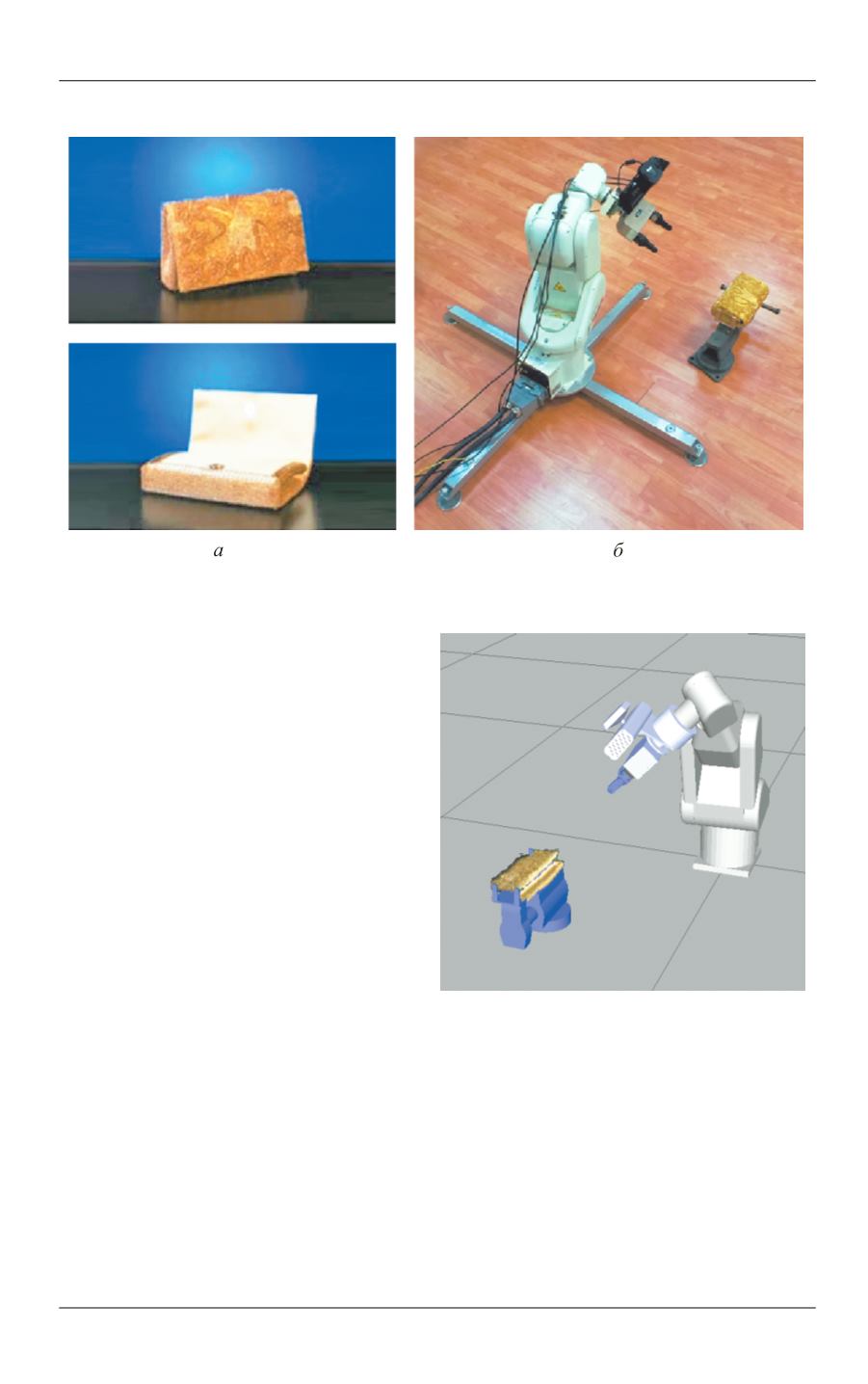
Рис. 2.
Виртуальная рабочая сцена для
планирования операции