














 5 / 14
5 / 14

Планирование, моделирование и экспериментальное исследование манипуляционной операции
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 4
61
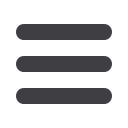
Линия перегиба клапана задается
оператором путем помещения на нее
двух точек. Затем, посредством переме-
щения и изменения ориентации стрелки
оператор задает вектор, определяющий
направление подвода пальца схвата под
клапан, и положение первой точки на
траектории открывания сумки. Эти дан-
ные используются на следующем шаге
для планирования траектории движения
при открывании сумки.
Шаг 4. Расчет координат точек на
траектории движения схвата при от-
крывании.
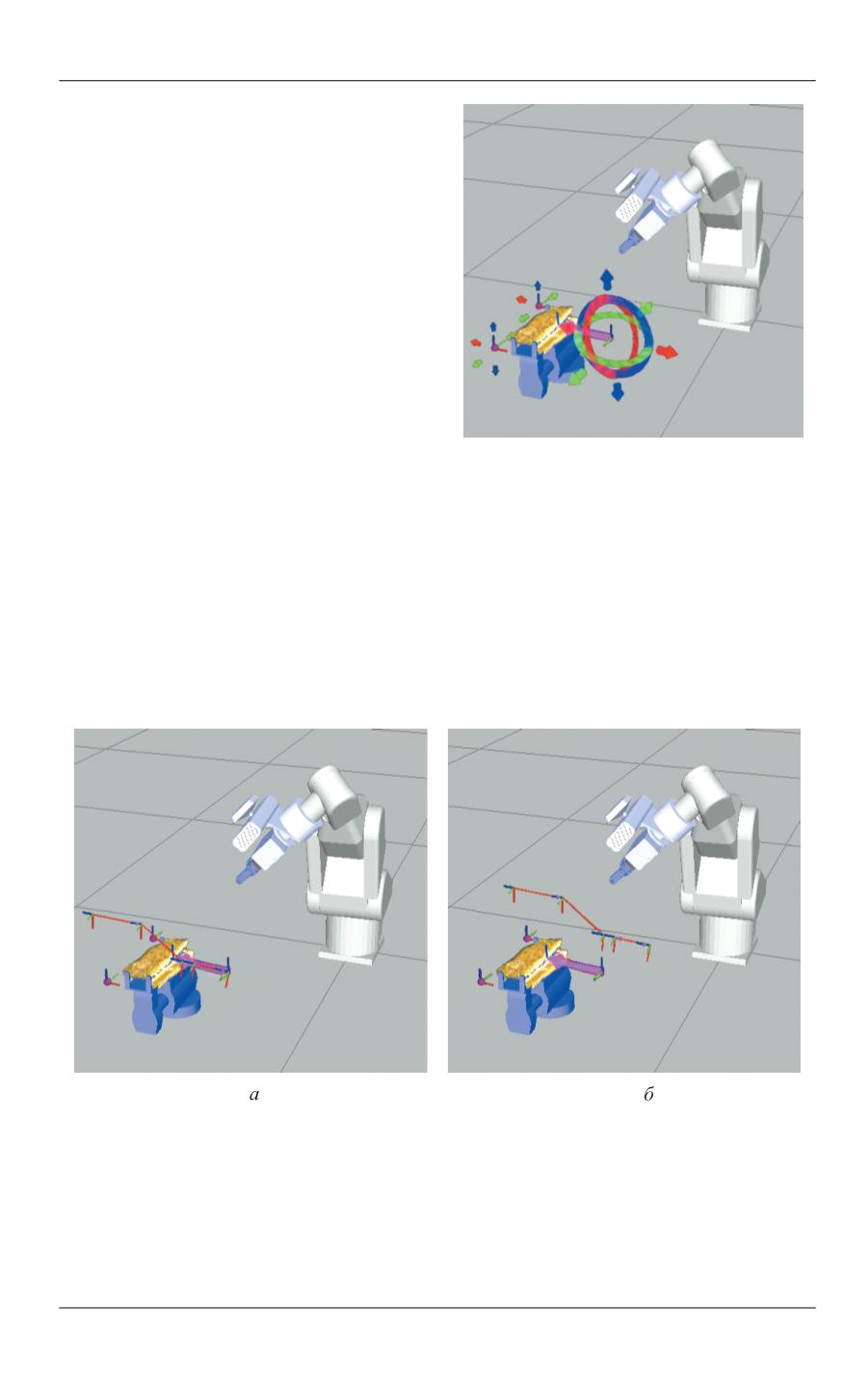
По параметрам, заданным на
предыдущем шаге, ПО рассчитывает тра-
ектории открывания для конца пальца и
для схвата манипулятора. Вычисленные
траектории отображаются на виртуальной сцене (рис. 5), красным цветом обозна-
чены вычисленные точки траекторий, через которые должны пройти конец паль-
ца (рис. 5,
а
) и схват манипулятора (рис. 5,
б
). В каждой из этих точек расположена
система координат, соответствующая заданной ориентации схвата (синим цветом
показаны оси
Oz
).
Рис. 5.
Траектория открывания для конца пальца (
а
) и схвата (
б
)
Линейные размеры изображенных ломаных соответствуют габаритным
размерам клапана, заданным с помощью линии перегиба и положения первой
точки траектории открытия, положение и ориентация соответствуют вектору
подхода, который располагается в плоскости траектории, а плоскость каждой
Рис. 4.
Задание координат линии
перегиба клапана сумки и вектора
подхода