A
р
=
r
св
x
2
a
−
2(
r
3
св
−
r
3
д
)
3
;
A
1
f
=
r
св
x
3
a
3
−
x
a
r
3
св
4
+
r
2
д
r
св
x
a
8
+
r
4
д
8
ln
x
a
+
r
св
r
д
;
A
2
f
=
r
св
x
3
a
3
+
x
a
r
3
д
4
−
r
2
св
r
д
x
a
8
−
r
4
св
8
arcsin
x
a
r
св
,
x
a
=
r
2
св
−
(
r
св
−
h
z
)
2
;
r
д
=
r
св
−
h
z
,
Решаясовместно уравнения(8) и принимая
˜
k
изг
= ˜
k
сж
, находим
k
изг
−
сж
=
A
р
M
f
ш
−
A
1
f
(
P
z
н
−
P
z
р
)
A
2
f
(
P
z
н
−
P
z
р
)
−
A
р
M
f
ш
;
k
сж
.
н
=
P
z
н
b
ш
y
(
A
1
н
+
k
изг
−
сж
A
2
н
)
;
˜
k
сж
= 1
−
b
ш
y
k
сж
.
н
A
1
н
+
k
изг
−
сж
A
2
н
−
P
z
р
A
р
(1 +
k
изг
−
сж
)
/x
a
.
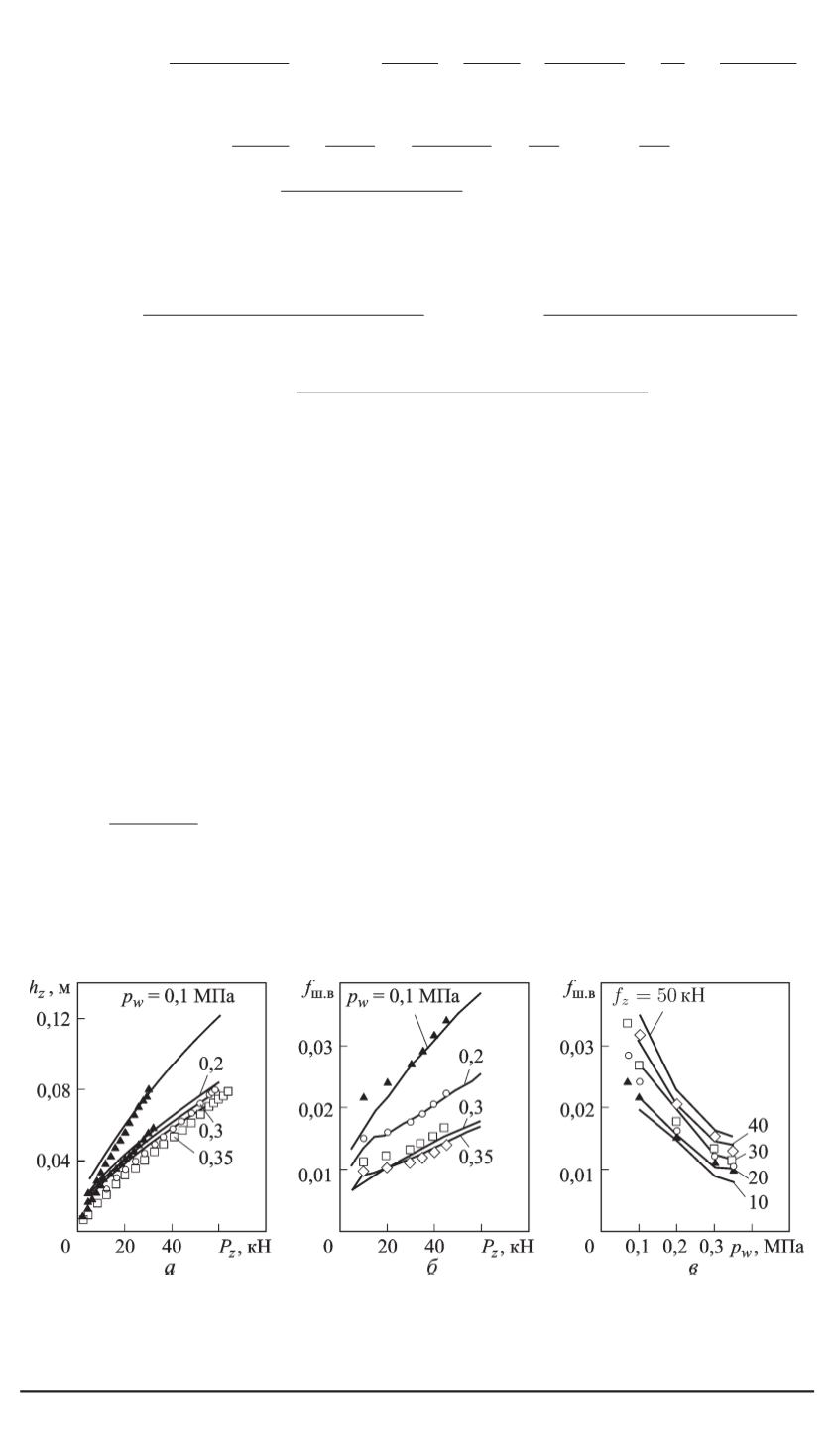
Расчетные кривые, представленные на рис. 3 и 4, близки к экспери-
ментальным данным, что подтверждает правомочность предлагаемого
метода.
Значенияпродольного сдвига
j
x
(относительного продольного пе-
ремещения)
i
-й точки беговой дорожки КД относительно ОП, положе-
ние которой характеризуетсяуглом
α
i
относительно вертикальной оси
Z
, при качении можно определить, рассматриваяповорот КД относи-
тельно мгновенного центра поворота точки
О
, расположенного по оси
Z
на расстоянии
r
к
от точки
O
к
, на угол
dα
(см. рис. 1).
Для
i
-й точки приращение продольного перемещения
dj
x
и пере-
мещение (сдвиг)
j
x
описываютсявыражениями
dj
x
=
r
св
−
h
z
cos
2
α
−
r
к
dα
;
j
x
= (
r
св
−
h
z
) (tg
α
a
−
tg
α
)
−
r
к
(
α
a
−
α
) ;
(9)
α
a
= arccos (
r
д
/r
c
в
) ;
α
a
1
=
−
α
a
;
α
= arctg (
x/r
д
)
.
Относительные сдвиги
˜
j
x
=
j
x
/r
св
с изменением относительного
Рис. 4. Изменение характеристик деформирования (
а
) и качения (
б
и
в
) шины
1300
×
530-533 модели ВИ-3:
кривые — расчет, точки — эксперимент
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2 65


