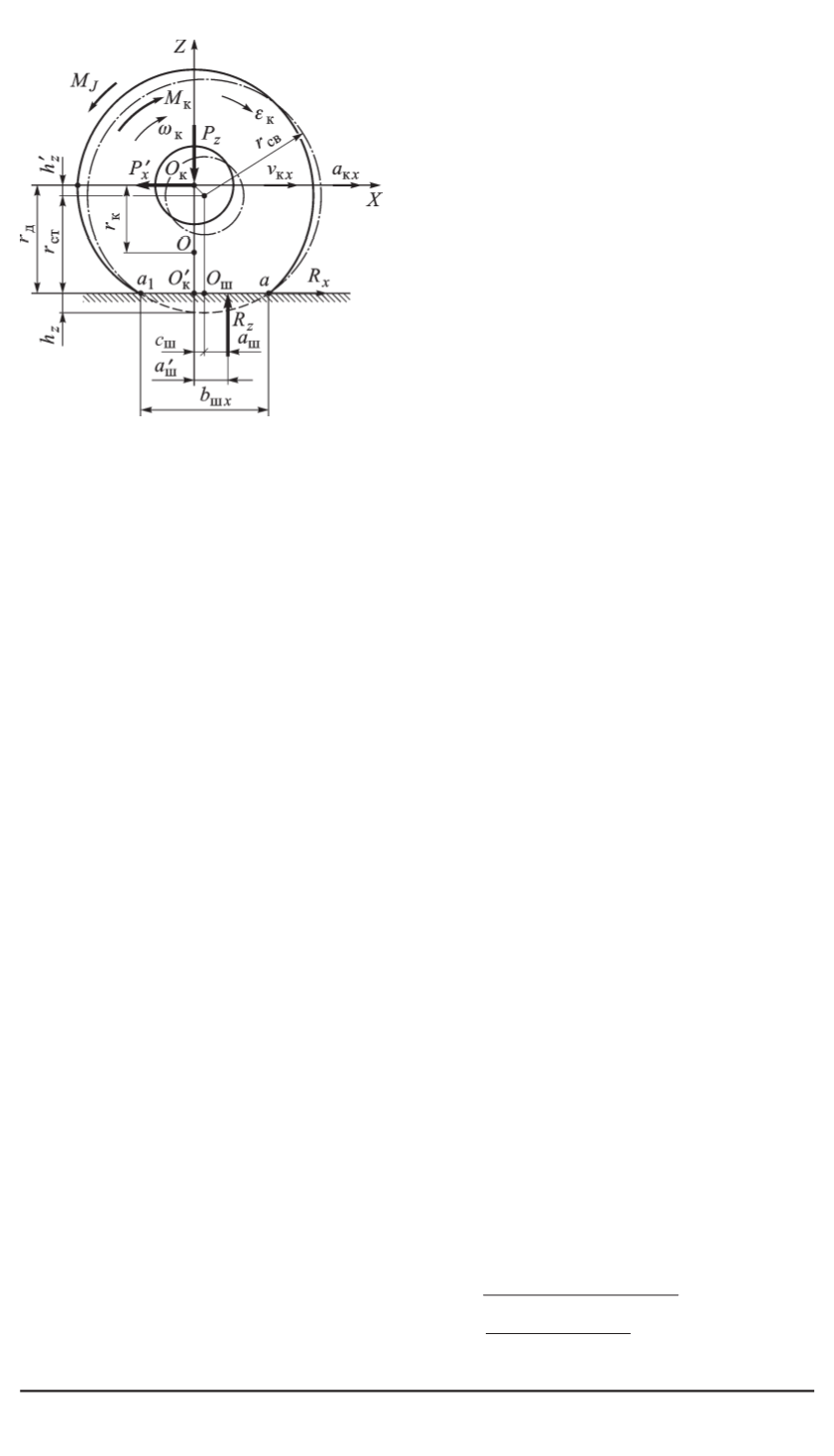
Рис. 1. Расчетная схема прямолиней-
ного качения колеса по твердой ОП
Изменение продольной реакции
R
x
и радиуса качения
r
к
(коэффици-
ента непосредственного продольно-
го скольжения
s
б
j
) в зависимости от
параметров микропрофиляи трения
шины КД по ОП изучено и описано
в меньшей степени.
В классической постановке
уравненияпрямолинейного движе-
нияКД (рис. 1) имеют вид [1]
R
z
=
P
z
+
P
a
z
;
R
x
=
P
x
=
P
x
+
P
a
x
;
M
к
=
R
z
a
ш
+
P
x
r
д
+
M
J
к
,
(1)
где
R
i
— реакции в пятне контакта;
P
i
и
M
к
— внешние силы и крутящий момент, приложенные к оси
КД;
P
a
z
=
m
к
a
к
x
,
P
a
x
=
m
к
a
к
x
и
M
J
к
=
J
к
ε
к
— инерционные силы и
момент (
a
к
z
=
d
2
z/dt
2
,
a
к
x
=
d
2
x/dt
2
,
ε
к
=
dω
к
/dt
,
m
к
и
J
к
— масса и
момент инерции КД);
a
ш
— продольное смещение точки приложения
вертикальной реакции
R
z
относительно центра контакта — точки
O
ш
.
Основнаяпроблема заключаетсяв определении параметров
a
ш
и
r
д
, зависящих от режима нагружения и скорости движения.
Примем допущение о независимости момента сопротивленияка-
чению (
M
f
ш
P
z
=
R
z
a
ш
), обусловленного нормальной нагрузкой
P
z
, от
продольной силы
P
x
. Продольное смещение нормальной реакции, обу-
словленное различными значениями нормальных элементарных реак-
ций в зонах нагрузки
dR
z
н
и разгрузки
dR
z
р
, является постоянным
(
a
ш
= const
), не зависит от
P
x
и отсчитываетсяот проекции на ось
X
центра КД (точка
O
к
), а не от центра контакта (точка
O
ш
).
Как показывают эксперименты, при качении КД под действием
силы
P
x
его ось смещаетсяв продольном направлении относительно
центра контакта на величину
c
ш
(см. рис. 1) и поднимаетсявверх на
величину
h
z
относительно режима свободного качения
P
x
= 0
(
r
д св
)
или статического положения(
r
ст
).
Продольное смещение оси пропорционально нормальной дефор-
мации
c
ш
=
h
z
P
x
/P
z
, а значение
h
z
определим как вертикальное из-
менение координаты точки
O
к
при угловом повороте отрезка
a
1
O
к
относительно точки
a
1
конца (или точки
а
начала) контакта и переме-
щении точки
O
к
по оси
X
на величину
c
ш
:
h
z
= 0
,
5
|
c
ш
|
b
ш
x
/r
ст
=
|
c
ш
|
1
(1
−
h
z
/r
св
)
2
−
1
.
(2)
60 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2


