— квазиоднопунктной (одна ведущая станция и две разнесенных пассив-
ных, измеряющих беззапросные суммарные дальности);
— однопунктной, измеряющей запросные дальности, а также углы азиму-
та и места (резервная технология управления для системы “Астра”).
При анализе предполагалось, что в рамках каждой технологии преду-
сматривается проведение ИТНП на двухсуточных интервалах, а также реше-
ние навигационной задачи и расчет максимальных отклонений от эталонной
орбиты на интервале прогноза 7 сут. по направлению радиуса-вектора (
r
),
трансверсали (
m
) и нормали (
n
).
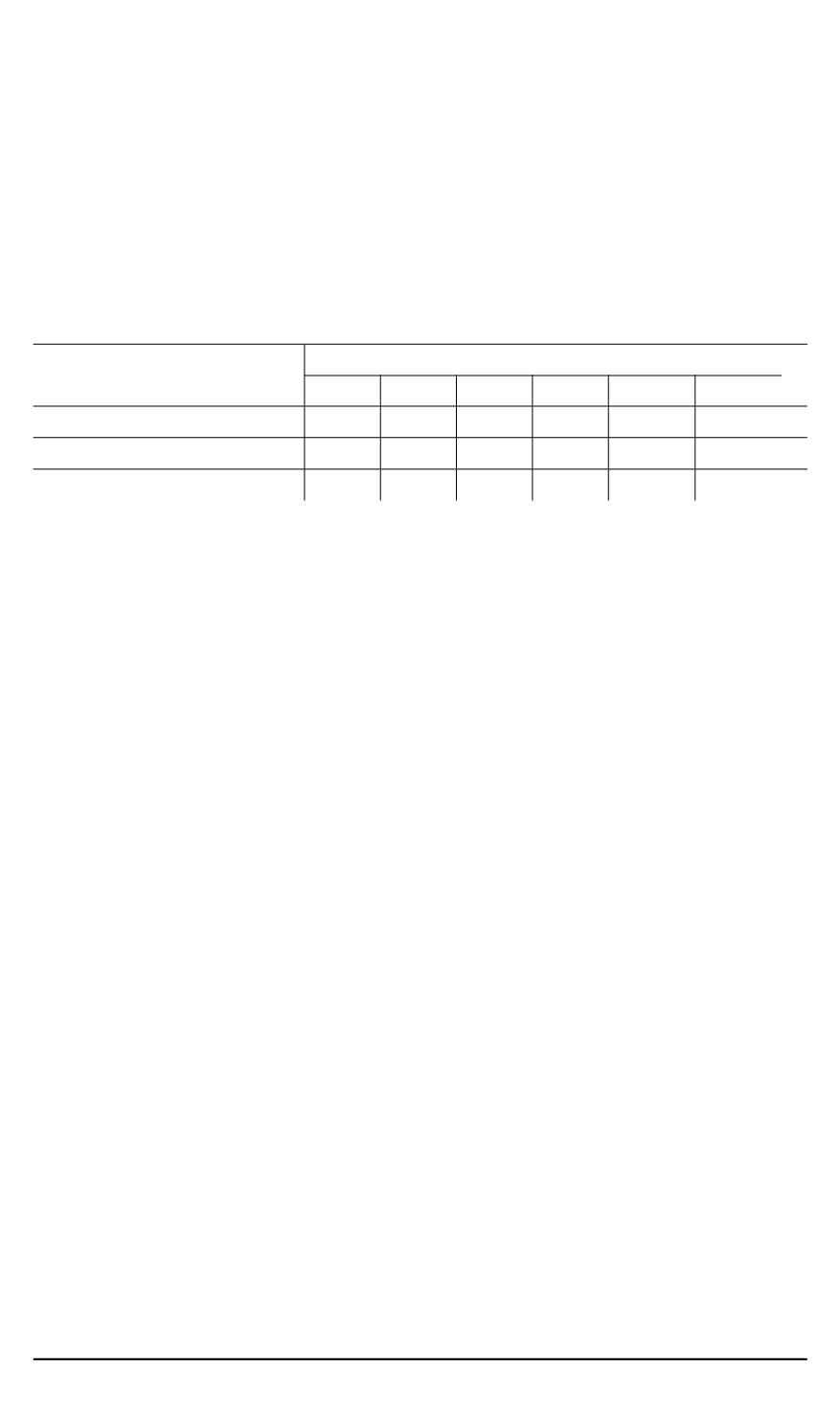
В табл. 6 приведены соответствующие статистические характеристики от-
клонений в виде их математических ожиданий (М) и СКО (
σ
)
.
Таблица 6
Вариант технологии
управления
Характеристики отклонений, м
M
r
σ
r
M
m
σ
m
M
n
σ
n
Многопунктная
3,6 3,3 23,0 13,3 5,9
2,1
Квазиоднопунктная
11,6 9,5 108,3 84,0 70,3 40,1
Однопунктная
161,6 128,5 433,7 251,0 1261,1 1007,9
Из табл. 6 со всей очевидностью следует, что точностные возможности
однопунктной технологии не сопоставимы с многопунктной и ни о какой
полной замене последней однопунктными технологиями, что довольно часто
предлагается применительно к широкому классу аппаратов пилотируемой
космонавтики, в принципе и разговора быть не может.
Вообще говоря, и к применению таких современных технологий, как
основанные на использовании НАП СНС и аппаратуры межспутниковых ра-
диолиний, применительно к решению задач навигации пилотируемых КА
следует относиться весьма осторожно. Дело заключается в том, что в отличие
от беспилотных пилотируемые КА располагают дополнительными и весьма
мощными возможностями навигационного бортового оснащения, включая
интеллект экипажа, не только конкурентоспособного по отношению к ука-
занным технологиям управления, но и зачастую превосходящего их. С учетом
изложенного имеются основания поставить под сомнение возможность со-
здания такого Единого государственного НАКУ КП, который в одинаковой
степени удовлетворял бы условиям оптимальности решения совокупности
целевых задач всех возможных типов КА как пилотируемых, так и беспилот-
ных.
При такой постановке всегда будут возникать ситуации, когда при реше-
нии одних задач СУ будет находится на грани (не исключено и за гранью)
своих возможностей, при решении других она будет функционировать в усло-
виях неоправданной избыточности.
В силу указанных обстоятельств более актуальной, чем попытка опреде-
ления облика единой оптимальной АСУ КП, представляется попытка опре-
делить минимально гарантирующий облик НАКУ, позволяющий при его
комплексировании сопутствующими средствами и технологиями управления
обеспечить решение целевых задач конкретными типами КА, оптимизируя
его, исходя из критерия, устанавливаемого лицом, принимающим решение
(ЛПР), на стадии стратегического планирования полета.
Практическая реализация указанного подхода сопряжена с необходимо-
стью разработки теоретически обоснованного и строго формализованного
механизма поддержки принятия решения ЛПР, в основу которого, как пред-
ставляется, может быть положена методика, базирующаяся на анализе обла-
стей достижимости. Поясним, чем мотивируется подобное предложение. От-
метим прежде всего, что понятие “область (множество) достижимости” явля-
28 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2011. № 1


