где
M
1
— приведенный к валу шестерни
1
момент ведущей части при-
вода от двигателя до шестерни
1
;
M
2
— приведенный к валу колеса
2
момент ведомой части привода от колеса
2
до исполнительного звена.
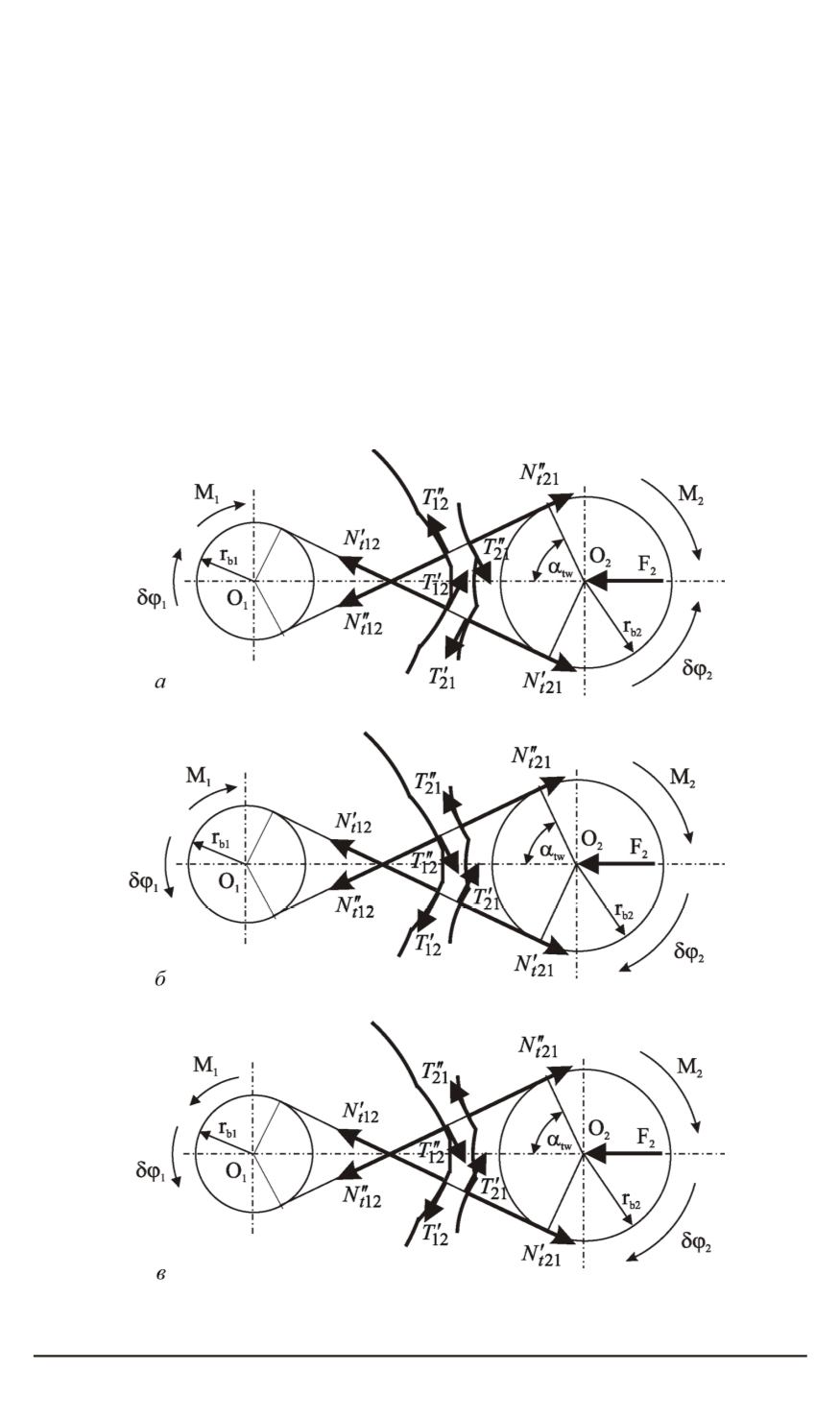
На рис. 2 для случая заполюсного зацепления показаны силы, дей-
ствующие на сопряженные контактирующие боковые поверхности зу-
бьев, сила упругости
F
2 деформированного обода гибкого колеса
2
и
приведенные моменты
M
1
и
M
2
. Зазоры между сопряженными про-
филями колес показаны условно.
Уравнения равновесия колес при установившемся движении в тя-
говом режиме прямого хода в соответствии со схемой сил на рис. 2,
а
имеют вид:
M
1
=
N
0
t
12
r
b
1
+
M
0
T
12
−
N
00
t
12
r
b
1
−
M
00
T
12
;
(2)
Рис. 2. Силовая схема заполюсного зацепления передачи с гибким венцом:
а
и
б
— тяговый режим прямого и обратного ходов;
в
— оттормаживание
6 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2014. № 3


