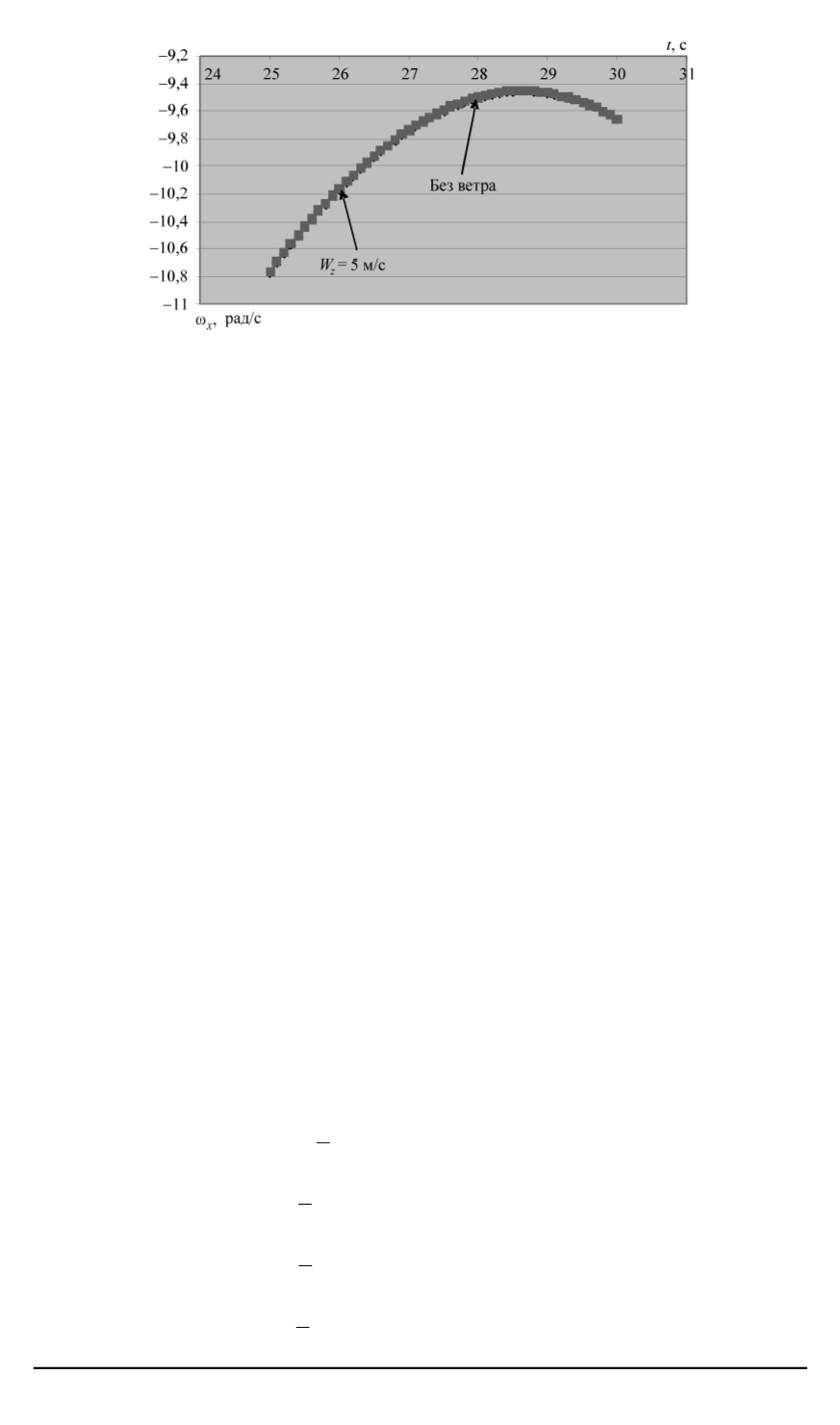
Рис. 5. Tрансформация составляющей угловой скорости вращения КБ по оси
OX
связанной системы координат в окрестности вершины траектории при
θ
0
= 75
◦
и
W
z
= 5
м/с
Алгоритм формирования импульсных корректирующих воздействий,
используемый при синтезе математической модели, обычно состоит
из двух блоков. Первый блок используется для определения значения
и знака угловой ошибки системы коррекции, в соответствии с ко-
торой происходит формирование сигнала на разрешение выключения
корректирующего двигателя. Второй блок предназначен для определе-
ния корректирующего двигателя, который должен быть включен для
выполнения коррекции траектории в нужном направлении. Угловая
ошибка системы коррекции определяется в измерительной системе
координат. Переход от связанной к нормальной (земной) системе ко-
ординат осуществляется с помощью следующей матрицы:
A
=
=
cos
ϑ
cos
ψ
−
sin
ϑ
cos
ψ
cos
γ
+ sin
ψ
sin
γ
sin
ϑ
cos
ψ
sin
γ
+ cos
γ
sin
ψ
sin
ϑ
cos
ϑ
cos
γ
−
cos
ϑ
sin
γ
cos
ϑ
sin
ψ
sin
ϑ
sin
ψ
cos
γ
+ cos
ψ
sin
γ
−
sin
ϑ
sin
ψ
sin
γ
+ cos
ψ
cos
γ
.
Для устранения особых точек по углу крена, который меняется в
широких пределах, при прямом решении задачи воспользуемся ме-
тодом определения угловых координат КБ с помощью соотношений
Родриго–Гамильтона:
˙
ρ
РГ
=
−
1
2
(
ω
х
λ
РГ
+
ω
у
μ
РГ
+
ω
z
ν
РГ
) ;
˙
λ
РГ
=
1
2
(
ω
х
ρ
РГ
+
ω
у
ν
РГ
+
ω
z
μ
РГ
) ;
˙
μ
РГ
=
1
2
(
ω
х
ν
РГ
+
ω
у
ρ
РГ
−
ω
z
λ
РГ
) ;
˙
ν
РГ
=
1
2
(
−
ω
х
μ
РГ
+
ω
у
λ
РГ
+
ω
z
ρ
РГ
)
,
48 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 3


