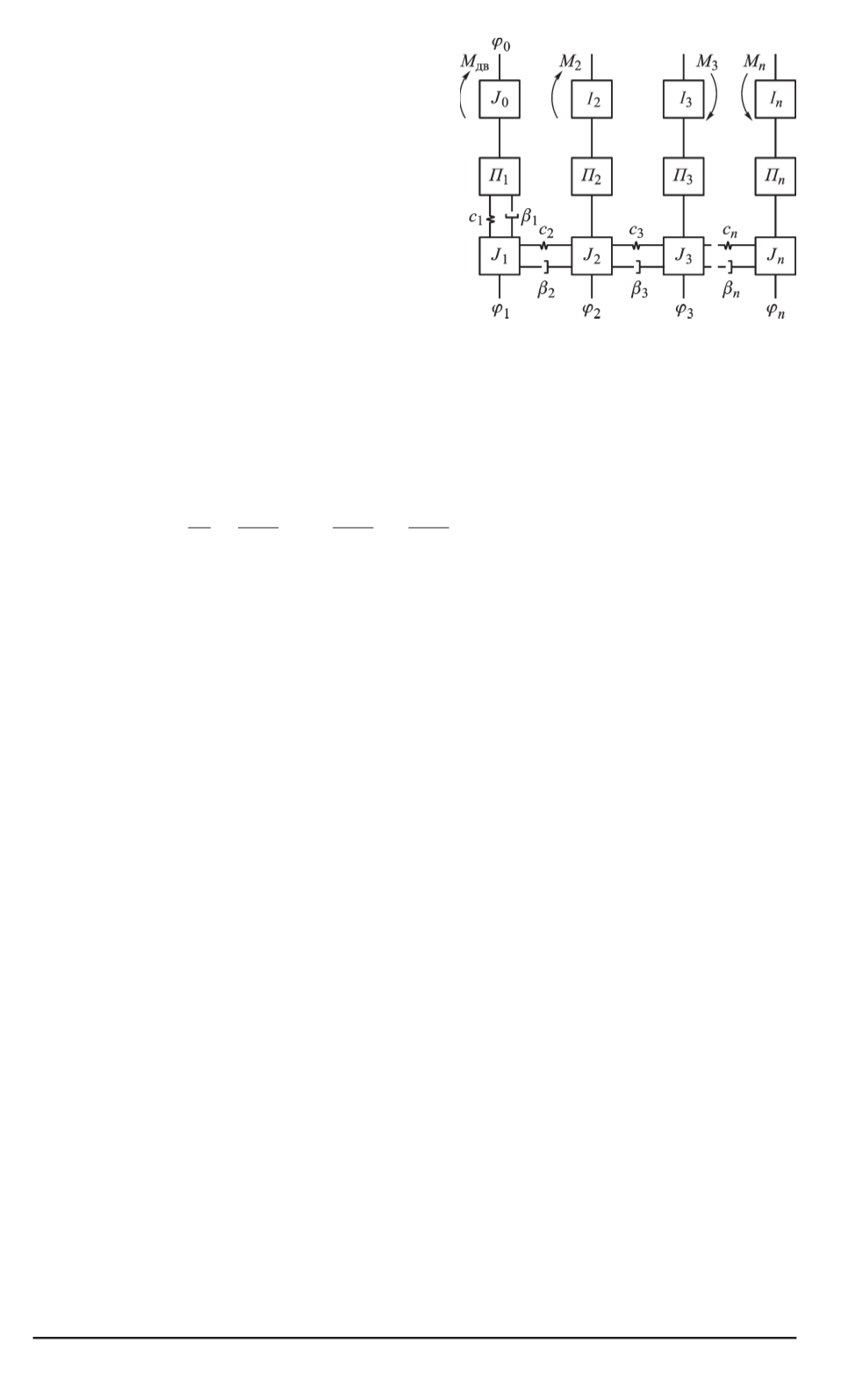
Рис. 2. Динамическая модель ма-
шины-автомата
в виде параллельно-последователь-
ной колебательной системы из
n
ме-
ханизмов с нелинейными функциями
положения ведомых звеньев. Эти ме-
ханизмы изображены в виде цепочки
соответствующих дискретных упру-
гих коэффициентов
с
i
, коэффициен-
тов сопротивления
β
i
, инерционных
(
J
i
, I
i
) моментов двигателя
M
дв
и со-
противления
M
i
, а также кинемати-
ческих элементов
П
i
, (
i
= 1
, . . . , n
)
(рис. 2).
Для составления уравнения движения механизмов машины-автомата
по динамической модели (см. рис. 2) воспользуемся уравнениями Ла-
гранжа второго рода с лишними координатами [6]:
d
dt
∂T
∂
˙
ϕ
j
−
∂T
∂ϕ
j
+
∂V
∂ϕ
j
=
Q
j
+
m
i
=1
λ
i
h
ij
;
m
+
n
j
=1
h
ij
˙
ϕ
j
+
h
i
= 0
,
(5)
где
ϕ
1
, ϕ
2
, . . . , ϕ
n
—
n
обобщенных координат;
λ
i
— множители Лагран-
жа;
h
ij
, h
i
— некоторые функции;
Т
— кинетическая энергия голоном-
ной системы;
V
— потенциальная энергия системы;
Q
j
— обобщенные
силы.
Для установления связи между уравнениями (2)–(4), описывающи-
ми совместную работу механизмов машины-автомата, и уравнениями
динамики (5) запишем функции положения и передаточные функции
механизмов машины-автомата в следующем виде:
П
i
=
П
i
1
[1
−
L
(
ϕ
i
−
α
i
1
)] +
+
m
j
=2
П
ij
1
−
L ϕ
i
−
j
r
=1
α
ir
·
L ϕ
i
−
j
−
1
r
=1
α
ir
;
П
i
=
П
i
1
[1
−
L
(
ϕ
i
−
α
i
1
)] +
+
m
j
=2
П
ij
1
−
L ϕ
i
−
j
r
=1
α
ir
·
L ϕ
i
−
j
−
1
r
=1
α
ir
;
П
i
=
П
i
1
[1
−
L
(
ϕ
i
−
α
i
1
)] +
+
m
j
=2
П
ij
1
−
L ϕ
i
−
j
r
=1
α
ir
·
L ϕ
i
−
j
−
1
r
=1
α
ir
,
(6)
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 2 63


