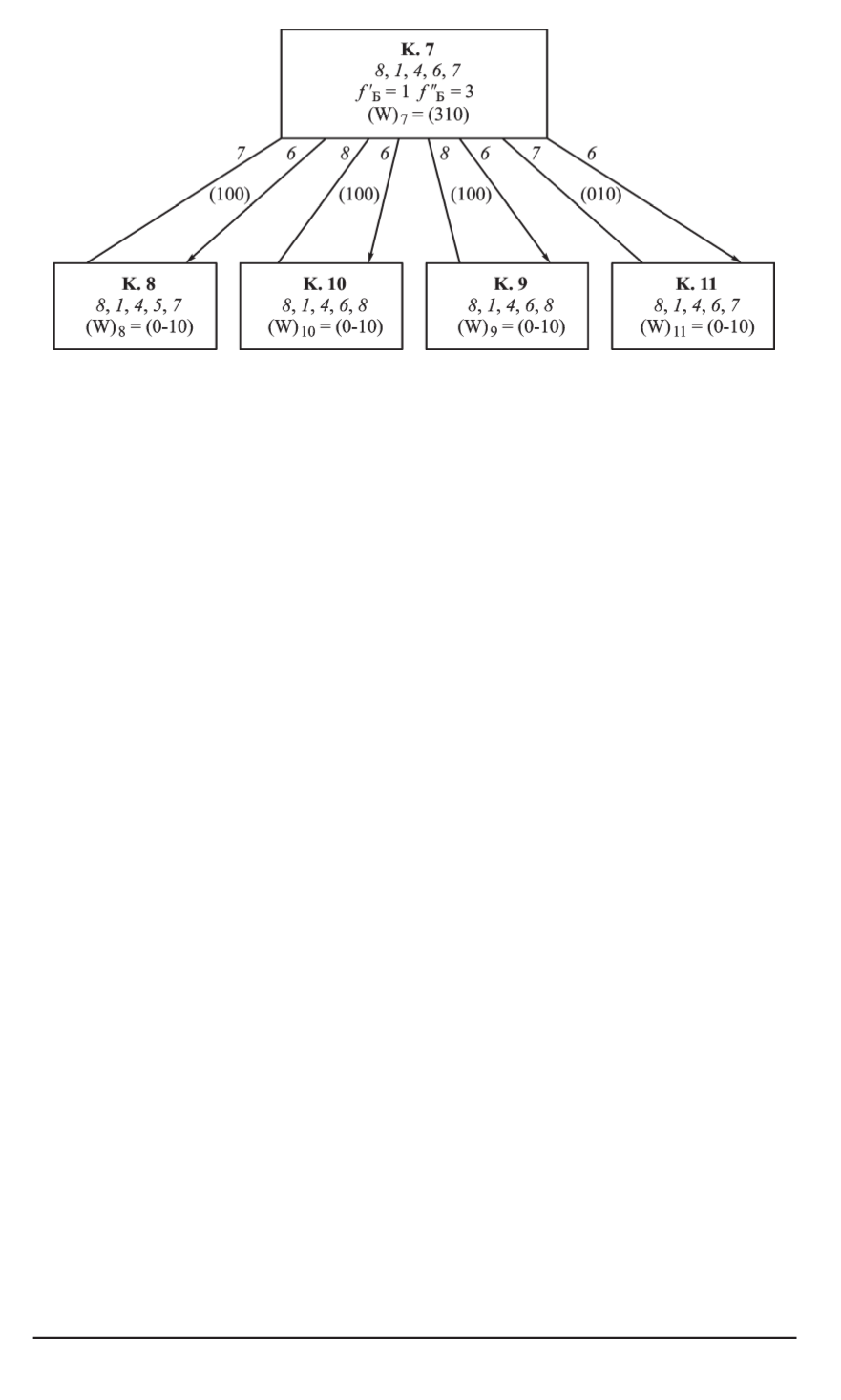
Рис. 5. Контурная сеть КПВМ
нам предыдущего присоединяются ребра, являющиеся характеристи-
ками данного контура, проводят соответствующие линии и отмечают
их этими вершинами (табл. 2).
Затем проводят анализконтурной сети следующим образом:
— если в контуре имеется подвижность у звена (группы звеньев),
номер которого стоит на линии, соединяющей этот контур с последу-
ющим, то эта лишняя подвижность может быть реализована по прави-
лам п. 5,
б, в
, если в последующем контуре имеется соответствующая
избыточная связь;
— если подвижность имеется у другого звена, то она не может быть
реализована;
— подвижность может быть реализована через контур (контуры),
не имеющий избыточных связей, при последовательном соединении.
Согласно приведенным этапам проводится структурный анализ
КПВМ.
1. По структурной схеме механизма строим его граф (см. рис. 3).
2. Определяем число независимых контуров по формуле (1):
K
=
p
−
n
+ 1 = 18
−
8 + 1 = 11
.
3. Изграфа удаляем 11 ребер так, чтобы не осталось ни одного
замкнутого контура. Получаем дерево (см. рис. 4).
4. К дереву прибавляем ребро
4–7
. Получаем первый независимый
контур —
8, 1, 4, 7
с кинематическими парами
А
, D, L, R
.
5. Проводим анализподвижностей первого контура, определяем
звенья и группы звеньев, имеющих подвижности.
6. Далее аналогичным образом рассчитываем все остальные кон-
туры. Данные расчета заносим в табл. 2, в которой штриховой линией
обозначены ребра, принадлежащие
K
(удаленные ребра); зачеркнуты
(значком “//”) ребра, участвующие в расчетах предыдущих контуров,
так же зачеркнуты кинематические пары контура. Оставшиеся пары
являются характеристиками данного контура.
10 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 2


