














 7 / 10
7 / 10

Для волновой передачи КПД зацепления можно определить по сле-
дующей зависимости:
η
зац
=
1
1 +
f
у
k
1
k
2
1
cos
2
α
w
,
где
k
1
,
2
— коэффициент, зависящий от закона распределения нагрузки
на зубья и от формы деформации гибкого колеса. При деформирова-
нии гибкого колеса по дугам постоянного радиуса
k
1
= 0
,
084
;
k
2
—
коэффициент деформации гибкого колеса (
k
2
= 0
,
9
. . .
1
,
1
).
Экспериментальное исследование КПД зацеплений с различной
деформацией гибкого колеса показало, что
η
зац
= 0
,
95
. . .
0
,
97
.
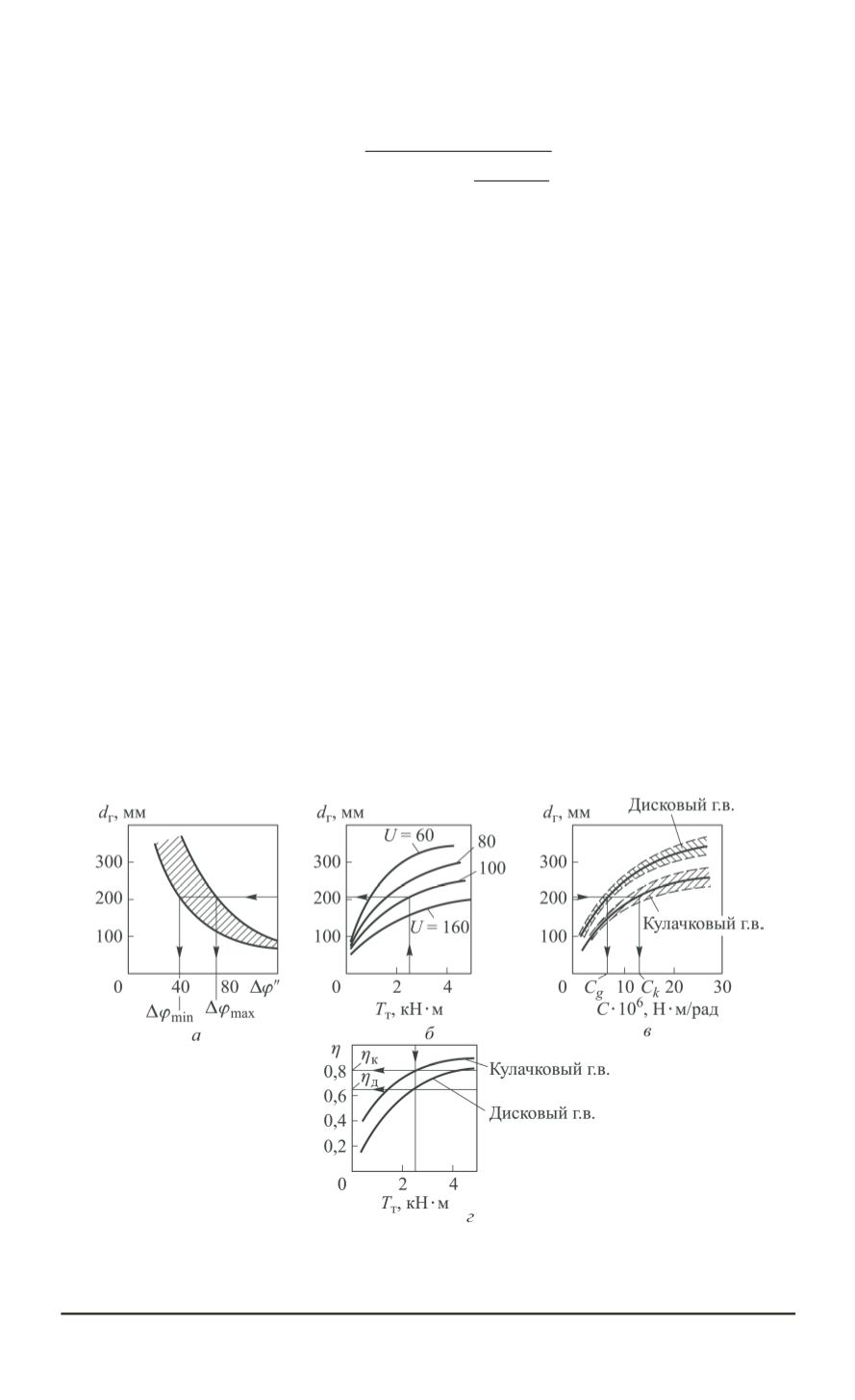
В основе первой фазы автоматизированного анализа кинематиче-
ских схем редукторов с ВЗП находятся зависимости, полученные экс-
периментально и теоретически и имеющие вид, аналогичный кривым,
приведенным на рис. 3,
а–г
. Эти зависимости позволяют оценить ка-
чественные показатели ВЗП при заданной нагрузке на выходном ва-
лу. По рис. 3 можно оценить качественные показатели, например при
T
T
= 2
,
5
кН
∙
м и передаточном отношении ВЗП
U
= 100
кривые (см.
рис. 3,
a
) дают предварительное значение диаметра гибкого колеса и
фактически определяют радиальный габаритный размер редуктора с
ВЗП.
При оценке быстродействия привода следует учитывать, что мо-
менты инерции кулачкового и дискового генераторов волн отличаются
в 100 раз и более, поэтому оптимизация быстродействия ВЗП с кулач-
ковым генератором волн носит формальный характер.
Рис. 3. Оценка качественных показателей проектируемого привода (г.в. —
генератор волн)
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2015. № 4 115