














 8 / 9
8 / 9

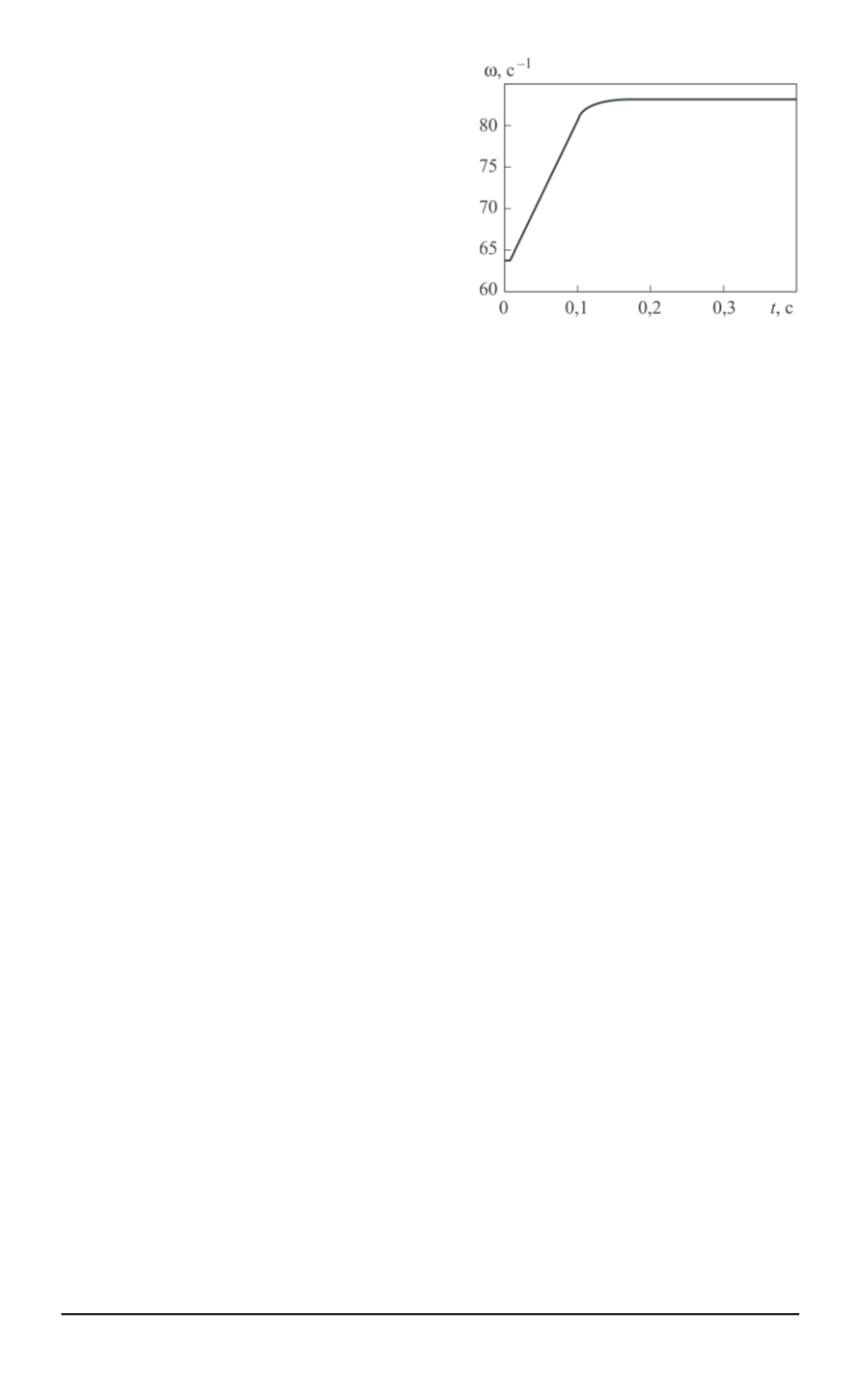
Рис. 4. График переходного про-
цесса
Формула для вычисления управля-
ющего воздействия имеет вид
u
(
i
) =
K
P
e
(
i
) +
K
0
I
n
X
i
=0
e
(
i
) +
+ (
αD
(
k
−
1)
−
b
d
(
y
(
i
)
−
y
(
i
−
1)))
.
(23)
В структуре изменился алгоритм
расчета дифференциальной составля-
ющей и появилась возможность огра-
ничения интегральной суммы. Диф-
ференциальная составляющая вычисляется по значению управляемого
параметра, что позволяет улучшить стабильность поддержания задан-
ного значения при наличии случайных возмущений. На начальном
этапе уместно использовать полученные ранее коэффициенты для про-
порциональной и интегральной составляющих.
Результаты моделирования работы регулятора приведены на рис. 4.
Таким образом, был выполнен переход от аналоговой реализации
закона управления к дискретному алгоритму, при этом для опреде-
ления значений коэффициентов регулятора применен аналитический
метод вычисления коэффициентов. Данный подход дает приемлемые
результаты и для дискретной реализации алгоритма управления.
Применение весового фактора при вычислении пропорциональной
составляющей и фильтра при вычислении дифференциальной соста-
вляющей регулятора дает возможность более гибкой настройки.
ЛИТЕРАТУРА
1.
Дорф Р.
,
Бишоп Р.
Современные системы управления / пер. с англ. под ред.
Б.И. Копылова. М.: Лаборатория Базовых Знаний, 2002. 832 с.
2.
Yun Li
,
Ang Kiam Heong
,
Chong Gregory
. PID Control System Analysis and Design
// IEE Control Systems Magazine. 2006. No. 2. P. 32–41.
3.
Astrom K.J.
,
Hagglund T.
PID Controllers. Theory. Design and Tuning // Secaucus
NJ USA: Instrument Society of America. 1994. 200 р.
4.
Wescott Tim
. PID without Ph.D. // EE Times-India. 2000. No. 10. P. 10–20.
5.
Субботина С.И.
,
Скобелкин С.З.
,
Хрящев Ю.Е.
Определение параметров систе-
мы автоматического регулирования скорости дизеля // Деп. НИИНАвтопром,
1979. № 9/95–Д393.
6.
Барков Ю.А.
Синтез регулятора частоты вращения для дизель-генераторной
установки / Деп. ВИНИТИ, 24.04.05. № 603–В2005.
7.
Vrancic D.
Design of Anti-Windup and Bumpless Transfer Protection: Ph.D. Thesis,
Ljubljana, 1997. 170 р.
REFERENCES
[1] Dorf R.С, Bishop R.H. Modern Control Systems (Russ. ed.: Sovremennye sistemy
upravleniya. Moscow, Laboratoriya Bazovykh Znaniy Publ., 2002. 832 p.).
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2015. № 3 141