














 5 / 9
5 / 9

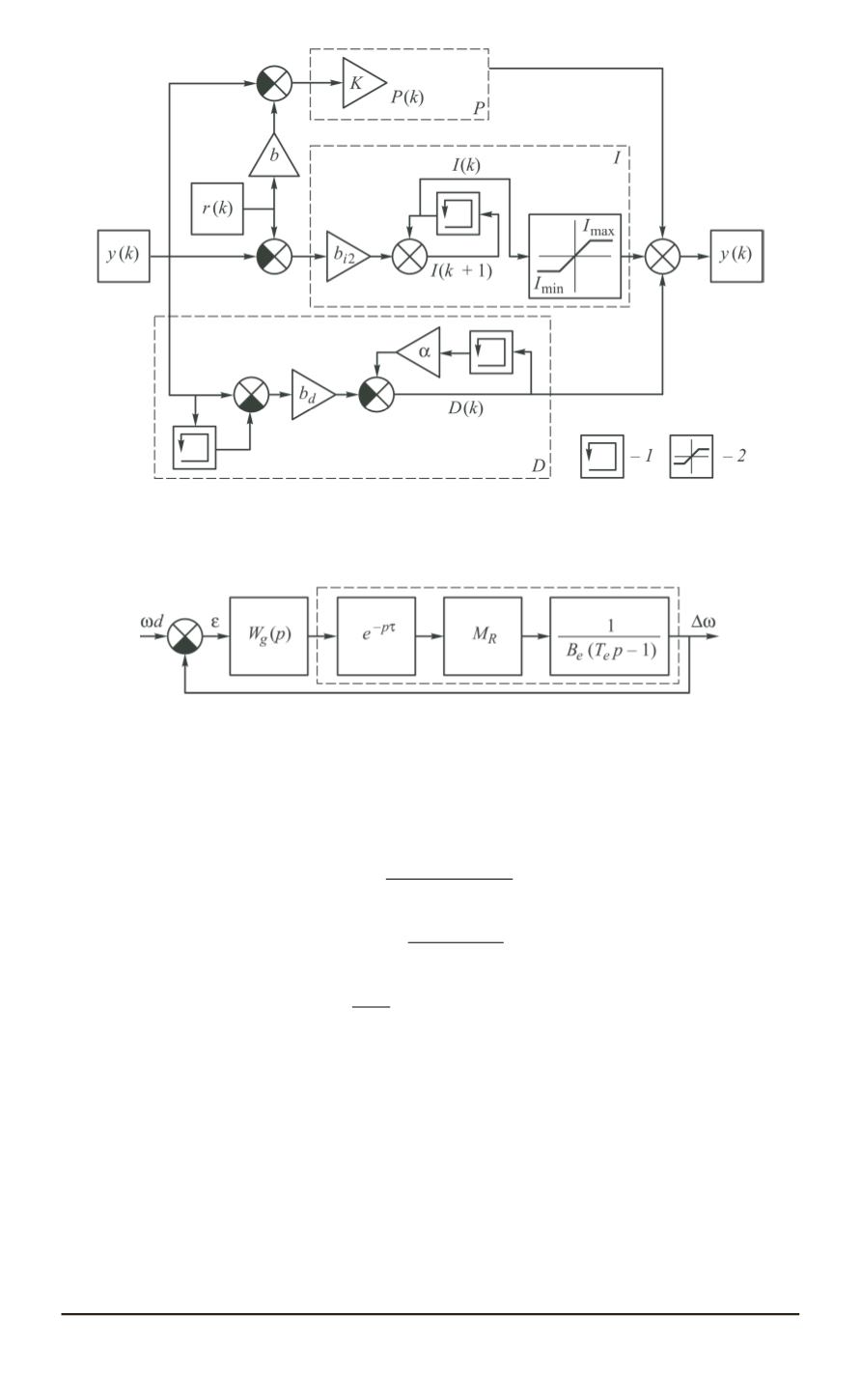
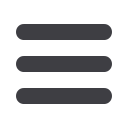
Рис. 1. Структурная схема aлгоритма вычисления управляющего воздействия:
1
— функция, возвращающая результат предыдущей итерации;
2
— функция,
ограничивающая минимальное и максимальное значения
Рис. 2. Структурная схема системы управления для расчета параметров
регулятора
Передаточная функция объекта управления системы, представлен-
ной на рис. 2, имеет следующий вид:
H
(
s
) =
M
R
B
e
(
T
e
s
−
1)
e
−
sτ
;
H
(
s
) =
K
1
(
T
e
s
−
1)
e
−
sτ
;
K
=
M
R
B
e
,
(13)
где
s
— комплексная частота;
M
R
— крутящий момент двигателя, при
полной подаче и угловой скорости коленчатого вала, равной
ω
0
;
B
e
—
фактор устойчивости двигателя;
T
e
— постоянная времени двигателя;
e
−
sτ
— время транспортной задержки,
M
R
= 800
H
∙
м
;
B
e
= 3
,
4 H
∙
м
∙
c;
T
e
= 1
,
25
c
;
τ
= 0
,
05
c
;
ω
0
= 62
,
8
c
−
1
.
(14)
Далее расчет коэффициентов выполняется по методу амплитудного
оптимума [7], который может быть применен для настройки ПИД-
138 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2015. № 3