привлекались данные оптических наблюденийспутника с телескопа,
установленного на Терсколе [1].
Для получения уточненных значенийвсех кинематических параме-
тров орбиты можно использовать метод главных компонент [7]. При
этом исключая незначимые компоненты (например, с применением
метода кросс-проверки [8]) удается получить устойчивое решение за-
дачи обработки измеренийдальности от единственнойстанции.
Среди известных подходов можно также назвать привлечение
априорнойинформации об ошибках параметров орбиты СИСЗ. Такая
информация обычно задается в виде ковариационнойматрицы. Ее
достаточно знать с точностью до некоторого множителя, значение
которого может приниматься в качестве параметра регуляризации и
выбираться при устойчивом решении одним из рекомендованных в
работах [4, 7] способов.
Общим недостатком перечисленных подходов, снижающим воз-
можность их применения в реальнойпрактике, является зависимость
от наличия и точности дополнительных данных о параметрах орбиты
спутника. Желательным является обеспечение возможности получе-
ния устойчивого решения только по одним дальностям при минималь-
ном использовании априорных ограниченийна исходные значения па-
раметров орбиты.
Предпосылки для совершенствования однопунктового способа
навигации СИСЗ.
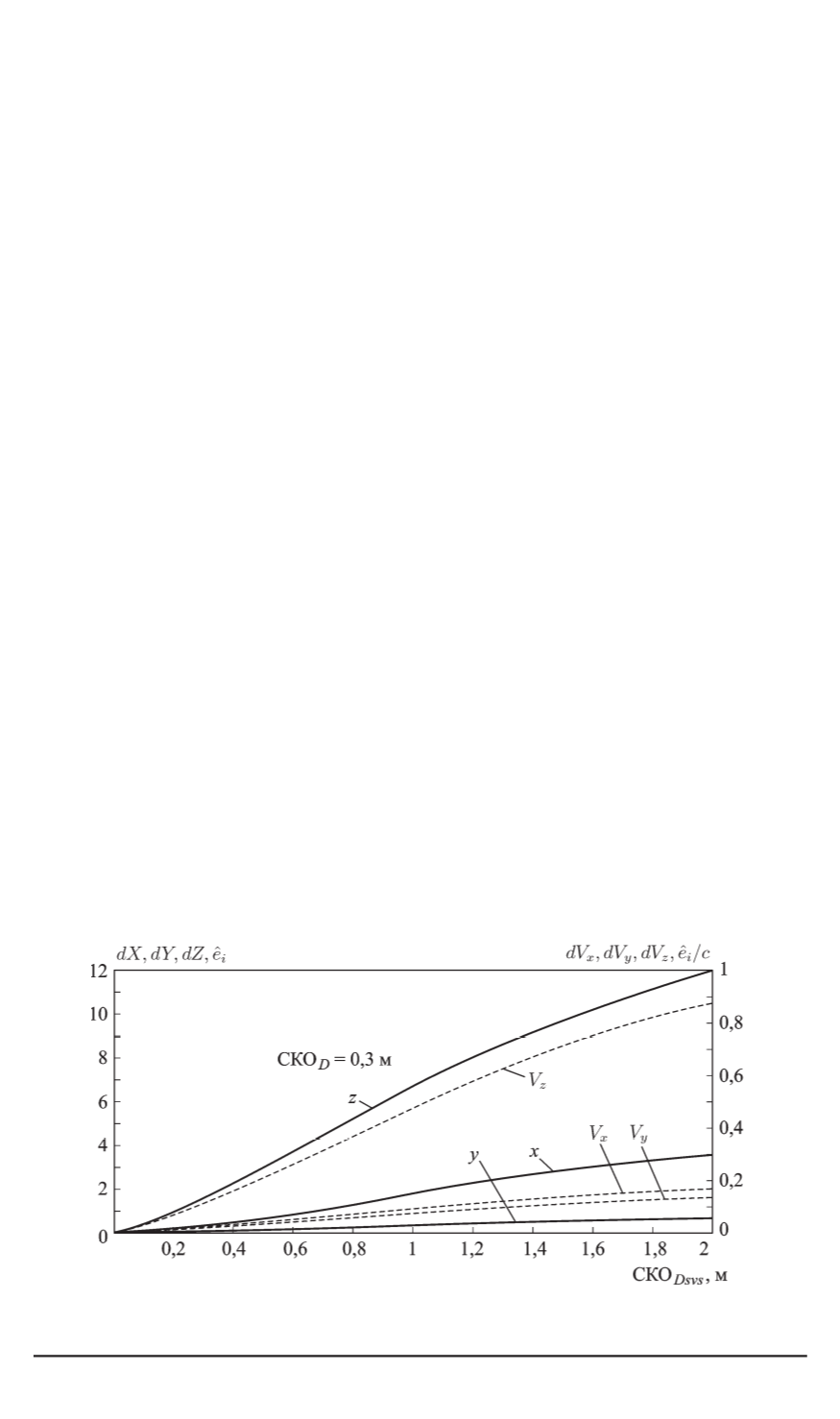
Исследования показывают, что информация о вне-
плоскостных параметрах орбиты СИСЗ в выборке измеренийдально-
сти, проведенных на определенных мерных интервалах с достаточной
точностью, все же имеется. На рис. 1 приведены графики изменения
отклоненийкоординат
dX
,
dY
,
dZ
и составляющих вектора скорости
СИСЗ
dV
x
,
dV
y
,
dV
z
по осям гринвичскойсистемы координат от соот-
ветствующих эталонных значенийпри их уточнении по моделирован-
ным измерениям дальности с постоянным уровнем СКО
D
случайной
погрешности 0,3 м и изменяющимся от 0 до 2 м уровнем сеансной
Рис. 1. Изменение ошибок навигации СИСЗ при возрастании уровня сеансных
систематических погрешностей измерений дальности
86 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2009. № 3


