Рис
. 2.
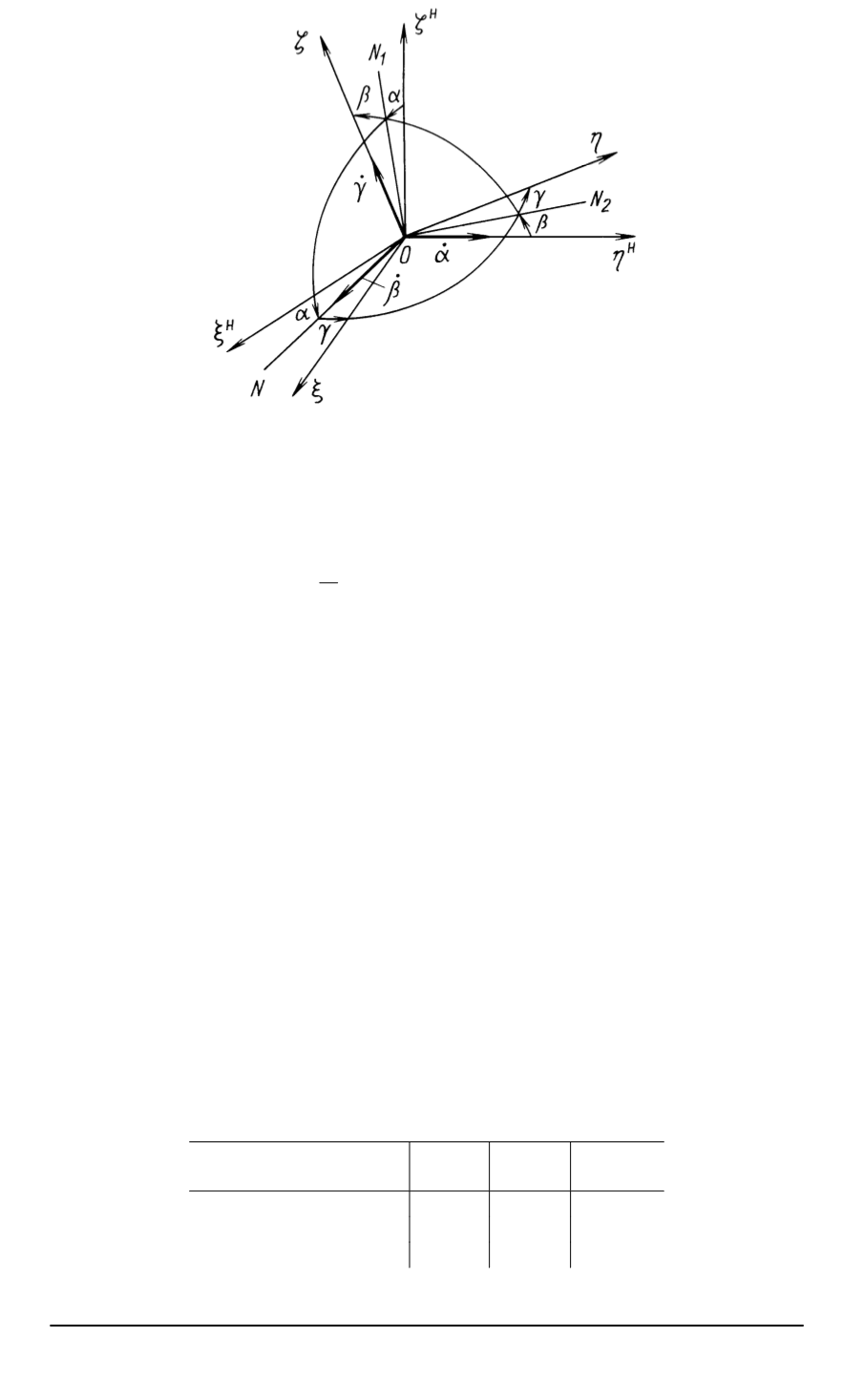
Введение углов
α
,
β
,
γ
—
совпадающую в начальный момент времени
t
=
0 c
системой коорди
-
нат
O
ξ ηζ
и
O
ξ
∗
η
∗
ζ
∗
,
оси последней параллельны соответствующим
осям системы координат
OXYZ
.
Переход от системы координат
O
ξ
н
η
н
ζ
н
к системе
O
ξ ηζ
задают с
помощью трех последовательных поворотов
[2] (
рис
. 2).
Первый
—
это
поворот плоскости
ξ
н
O
ζ
н
вокруг оси
O
η
н
на угол продольного крена
α
,
в результате этого поворота ось
O
ξ
н
займет положение
ON
, a
ось
O
ζ
н
—
положение
ON
1
.
Второй поворот
—
это поворот плоскости
N
1
O
η
н
вокруг линии узлов
ON
на угол поперечного крена
β
,
в результате этого
поворота ось
ON
1
займет положение
O
ζ
,
а ось
O
η
н
—
положение
ON
2
.
Третий
—
это поворот плоскости
NON
2
вокруг оси
O
ζ
на угол рысканья
γ
,
в результате ось
ON
займет положение
O
ξ
,
а ось
ON
2
—
положение
O
η
.
Взаимное расположение осей систем координат
O
ξ ηζ
и
O
ξ
н
η
н
ζ
н
может быть задано с помощью косинусов углов между соответствую
-
щими осями координат
,
что с учетом малости углов
α
,
β
,
γ
может быть
представлено в виде таблицы
.
Таблица
Значения косинусов углов между
соответствующими осями координат
Центральные оси
корпуса
O
ξ
н
O
η
н
O
ζ
н
O
ξ
1
γ
−
α
O
η
−
γ
1
β
O
ζ
α
−
β
1
18 ISSN 0236-3941.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Машиностроение
". 2003.
№
4


