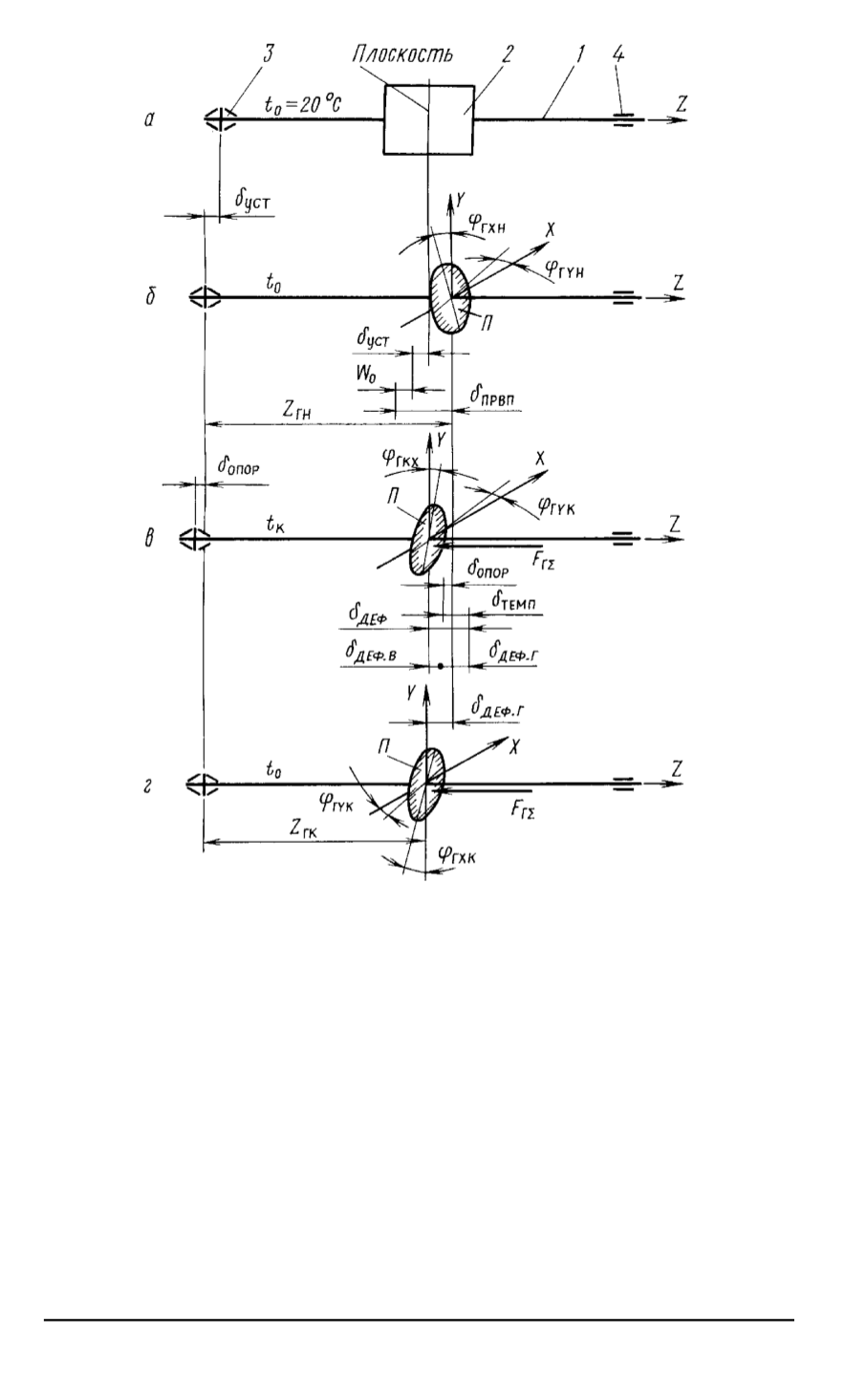
Рис
. 1.
Расчетная схема
:
1
—
винт
;
2
—
гайка со средней по длине плоскостью
“
П
”;
3
—
фиксирующая опора
;
4
— “
плавающая
”
опора
;
а
—
эталонная ПРВП
;
б
—
кинематическая ПРВП
;
в
—
силовая ПРВП
;
г
—
силовая ПРВП только для определения погрешностей
осевой зазор между витками резьбы винта
,
роликов и гайки
,
мкм
;
δ
ПРВП
—
погрешность
(
перемещение гайки относительно винта
)
кинематиче
-
ской ПРВП из
-
за неточностей изготовления резьбовых деталей переда
-
чи по шагу резьбы
,
мкм
;
методика определения этой погрешности при
-
ведена в работах
[1, 2];
δ
деф
—
осевое перемещение гайки из
-
за дефор
-
маций винта
,
резьбовых роликов и гайки ПРВП под действием рабочей
нагрузки
,
мкм
;
δ
темп
—
осевое перемещение гайки из
-
за температурных
деформаций деталей ПРВП
,
в первую очередь винта
,
мкм
.
74 ISSN 0236-3941.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Машиностроение
". 2003.
№
3


