














 11 / 18
11 / 18

А.Г. Лесков, К.В. Бажинова, Е.В. Селиверстова
132
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2017. № 3
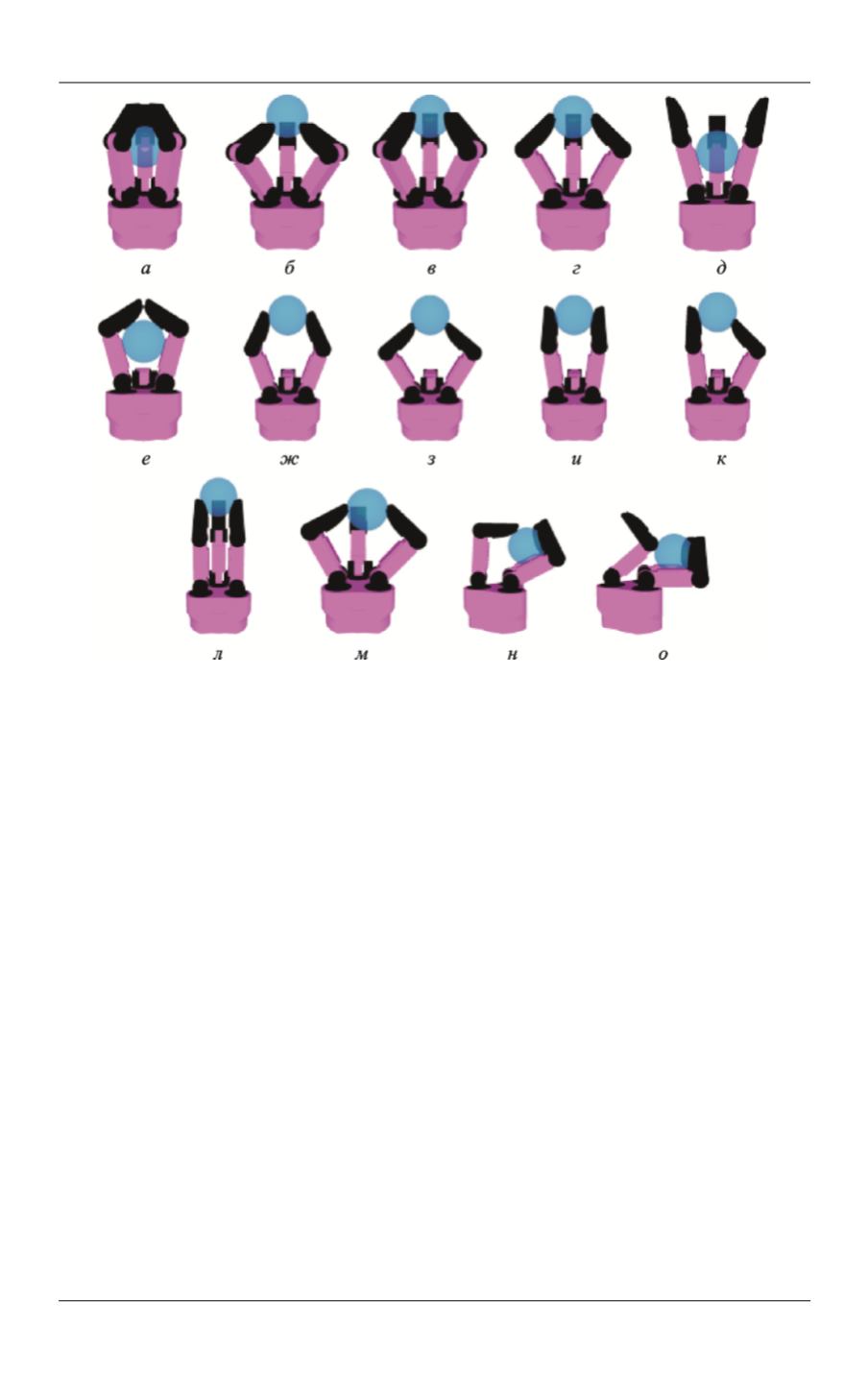
Рис. 2.
Способы захвата объекта
Группа показателей А.1 характеризует способность захвата к сопротивле-
нию возмущениям и степень близости к замкнутости по форме. Замкнутость по
форме является достаточным, но не необходимым условием наличия у захвата
свойства сопротивления возмущениям. Захват может быть замкнутым по силе,
что также наделяет его рассматриваемым свойством.
Сравнение способов захватов по критериям А.1.1, А.1.2 и А.1.3 показало,
что наиболее удачные объемные захваты. Среди них лучшим является захват
а
,
при котором пальцы ЗУМ охватывают ОМ. Наименее удачные, согласно этим
критериям, все плоские захваты (рис. 2,
в
–
к
).
Такой результат можно объяснить тем, что в случае замкнутого по форме
захвата неподвижность ОМ обеспечивается за счет расположения контактных
регионов между поверхностями ОМ и пальцев ЗУМ, а любой плоский захват не
обладает свойством замкнутости по форме — он всегда имеет хотя бы одну
степень свободы, по которой пальцы ЗУМ не ограничивают перемещение ОМ.
А значит, хотя бы одно сингулярное число матрицы
G
равно нулю.
Группа показателей А.2 характеризует устойчивость захвата.
Согласно критерию А.2.1, наиболее удачными являются захваты, приведенные
на рис. 2,
в
,
д
,
ж
,
з
,
и
,
к
. В случае, показанном на рис. 2,
в
и
д
, фигуры захвата — пра-
вильные треугольники, способы захвата (см. рис. 2,
ж
,
з
,
и
,
к
) по этому показателю
оптимальны в силу того, что их фигуры захвата — отрезки.