














 8 / 11
8 / 11

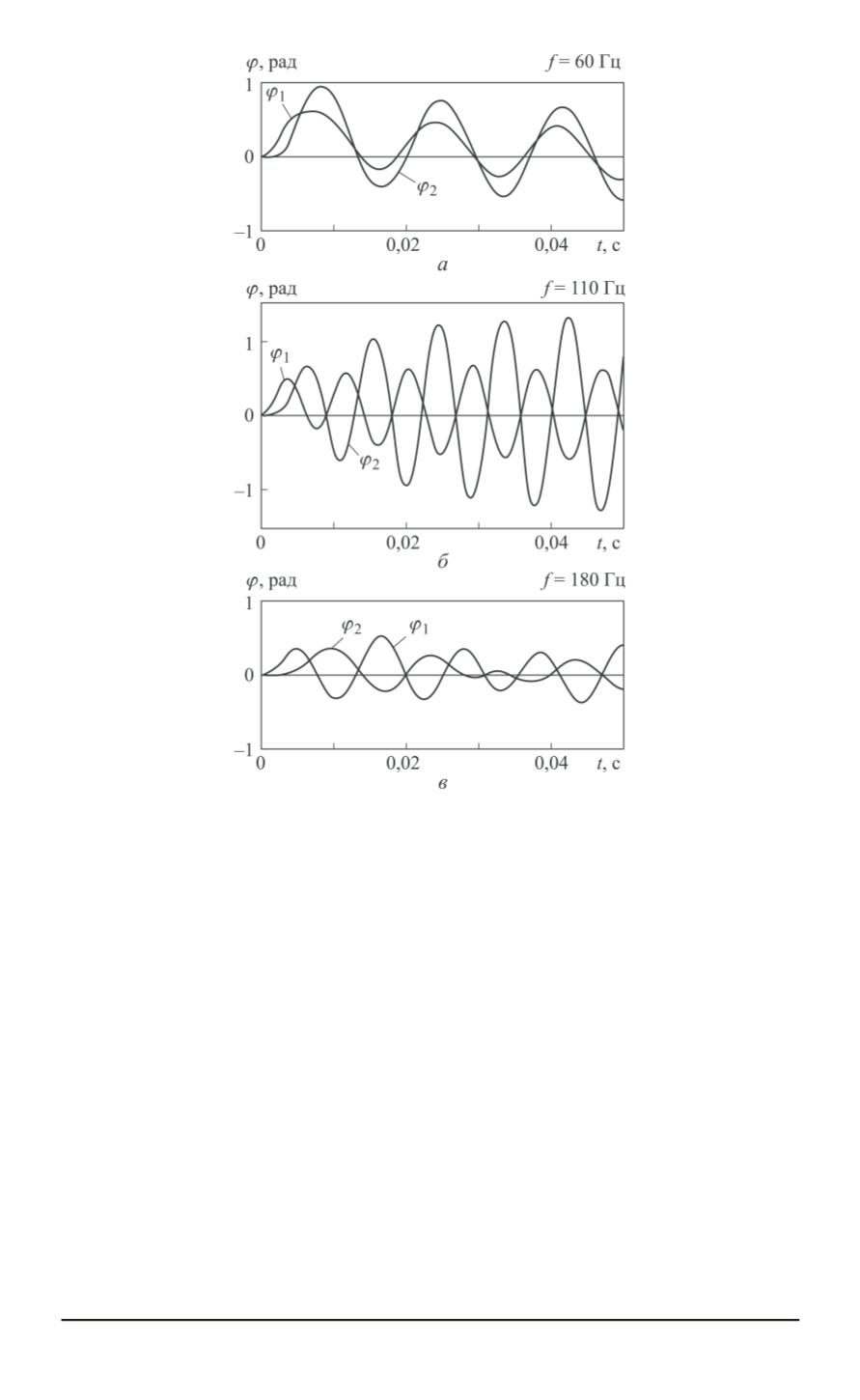
Рис. 4. Примеры диаграмм зависимостей
ϕ
1
=
f
(
t
)
и
ϕ
2
=
f
(
t
)
для частот
f
= 60
, 110, 180 Гц
f
=
ω/
2
π
; шаг по времени
Δ
t
; начальные условия
x
10
= ˙
ϕ
10
,
x
20
=
ϕ
10
,
x
30
= ˙
ϕ
20
,
x
40
=
ϕ
20
при
t
= 0
. Расчет проводится для заданной часто-
ты
f
и прекращается при выходе на установившийся режим движения.
После выполнения расчета на печать выводятся значения времени
t
и
угловые координаты. Примеры диаграмм зависимостей
ϕ
1
=
f
(
t
)
и
ϕ
2
=
f
(
t
)
для частот
f
= 60
,
110
,
180
Гц приведены на рис. 4.
Анализ результатов моделирования и их сравнение с резуль-
татами эксперимента.
По полученным диаграммам определялись в
установившемся режиме амплитуды
ϕ
1
и
ϕ
2
, сдвиг фазы
θ
и динамиче-
ская ошибка
Δ
ϕ
. Результаты этих измерений представлены в таблице.
По этим данным построены амплитудная и фазовая частотные ха-
рактеристики электропривода с ВЗП, которые приведены на рис. 5.
Согласно результатам моделирования резонанс в приводе при инерци-
онной нагрузке
J
н
= 0
,
03
кг
∙
м
2
возникает при частоте возмущающего
сигнала
f
= 90
Гц.
124 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2015. № 5