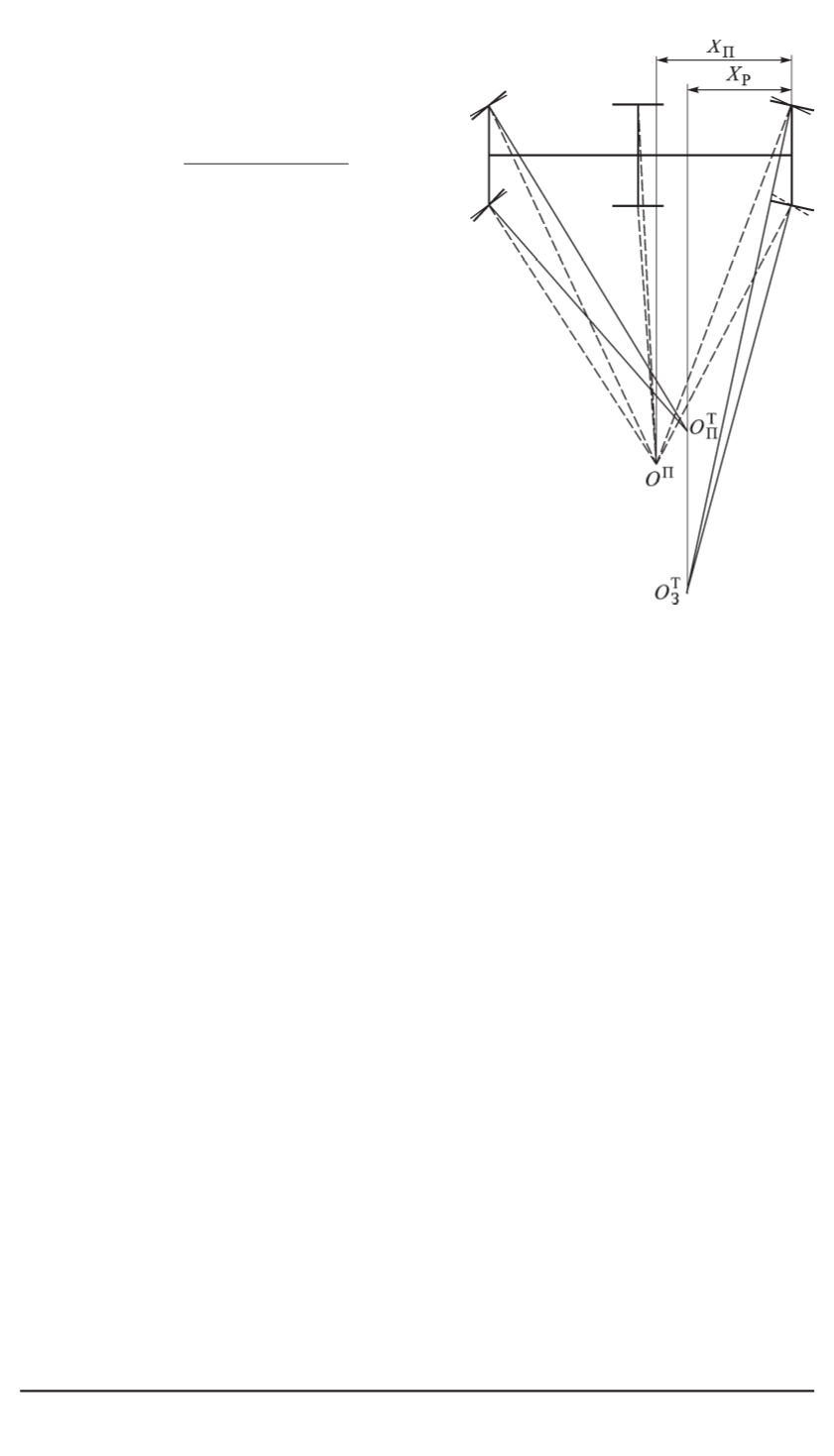
Рис. 2. Кинематика поворота
Угол поворотаколес задней оси
“при запаздывании” определяется по
зависимости
θ
зад
=
(
θ
p
−
θ
зап
)
θ
max
(
θ
max
−
θ
зап
)
,
(1)
где
θ
max
— максимальный угол пово-
рота задающего колеса, обусловлен-
ный конструктивными ограничени-
ями.
В 1990-е годы в МГТУ
им. Н.Э. Баумана совместно с
НИИИ 21 МО РФ был создан ма-
кетный образец шасси МЗКТ 79085
(
8
×
8
) со всеми управляемыми коле-
сами, способный осуществлять дви-
жение относительно произвольного
полюсаповорота(рис. 3). Поворот
колес наэтом макете осуществляет-
ся электрогидравлическим следящим
приводом. Наэтом макете былареа-
лизована система рулевого управления с “гибкой” геометрией, разра-
ботанная на кафедре “Колесные машины” МГТУ им. Н.Э. Баумана.
В зоне, соответствующей малым углам поворота рулевого коле-
са, т.е. движению, близкому к прямолинейному, что, как правило,
характерно для высоких скоростей движения, машина имеет малую
чувствительность к управлению и, следовательно, высокую курсовую
устойчивость движения. При больших углах поворота рулевого колеса
маневренные свойства резко возрастают.
Основная же задача алгоритма и разработанной на его основе про-
граммы управления – согласовать между собой углы поворота каждого
колеса при выбранном способе управления. Этого позволяет добить-
ся задатчик положения полюса поворота, который выполнен таким
образом, что имеется возможность изменять его положение непрерыв-
но, ане дискретно, как, например, у прицепных модулей “Кометто”
(рис. 4, 5). Таким образом, применяемый алгоритм становится универ-
сальным, способным реализовать практически любой способ управле-
ния транспортным средством.
Выбор такого закона управления основан на результатах большого
числа теоретических исследований и практике зарубежных и отече-
ственных автомобильных фирм, а также расчетах, проведенных для
различных видов этих законов Н.М. Назаровым и В.Г. Корниловым
[1, 4]. По результатам предварительных исследований было предло-
жено остановиться на двух вариантах закона управления.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2 105


