Методика проведения испытаний заключается в следующем: при
минимальной скорости КМ был подобран необходимый для движе-
ния с требуемым радиусом угол поворота рулевого колеса. На режиме
“ползучей” скорости (
≈
5
км/ч) вводим модель автомобиля в режим
криволинейного движения и подбираем задающий угол, необходимый
для выполнения маневра. Далее увеличиваем скорость от заезда к
заезду (на 1. . . 3 км/ч) в целях определения предельной скорости. Ма-
невр считается выполненным, если фактический радиус поворота не
превышает теоретического значения на 5%. По условиям обеспечения
устойчивости в ходе проведения вычислительных экспериментов была
определена предельная скорость выполнения маневра, равная 42 км/ч.
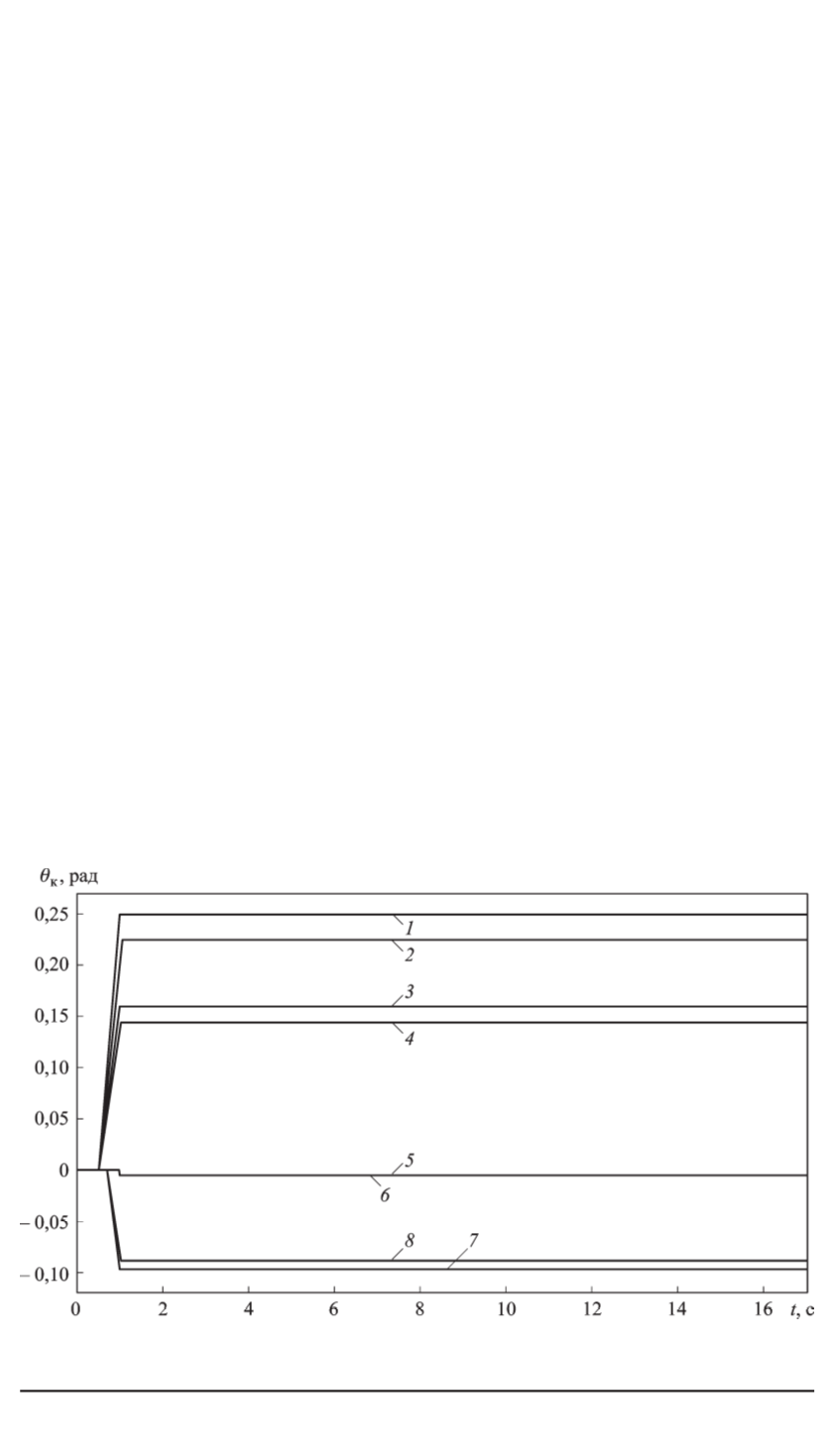
Первые 0,5 с КМ двигается прямо без воздействия водителя на руле-
вое колесо. В дальнейшем водитель задает закон изменения поворота
колес, воздействуя нарулевое колесо, в соответствии с углом поворо-
тапервого “условного” колеса(рис. 8.). Начальная скорость движения,
равная предельной по условиям выполнения маневра, поддерживает-
ся постоянной. Отметим, что при выполнении маневранаскоростях,
превышающих 42 км/ч, был зафиксирован отрыв всех колес одного
борта, что означает потерю устойчивости по критерию опрокидыва-
ния транспортного средства.
На рис. 9 изображены траектории движения центров передней и
задней осей автомобиля при выполнении типового маневра “поворот
на опорном основании “грунтовое основание” (с коэффициентом взаи-
модействия движителя с опорным основанием при полном буксовании
μ
s
max
= 0
,
6
). Принимаем
θ
зап
= 5
◦
;
θ
max
= 32
◦
;
θ
p
= 13
,
5
◦
. Время мо-
делирования
t
= 17
с.
Рис. 8. Углы повор ота колес
112 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2


