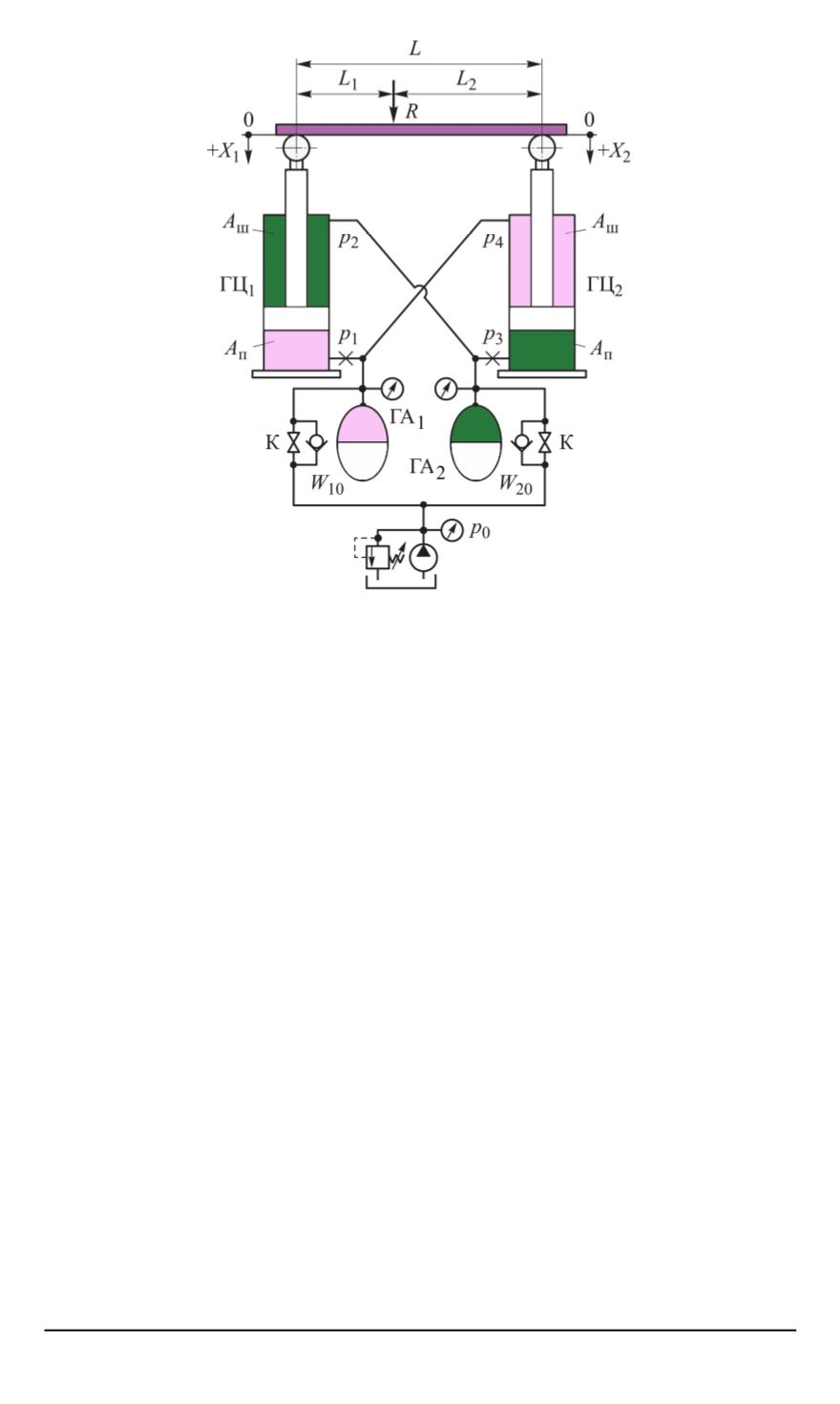
Гидравлическая схема гидропневматической подвески
p
0
в полостях гидроцилиндров обеспечивается питающей установкой
малой мощности посредством подпиточных клапанов К.
Рассмотрим условия равновесия несущей балки горизонтальной
грузовой платформы, установленной на гидропневматической подвес-
ке [11]. При отсутствии смещения нагрузки
R
относительно верти-
кальной оси балки
L
1
=
L
2
= 0
,
5
L
, дополнительная нагрузка на што-
ках гидроцилиндров отсутствует,
Δ
R
= 0
и, без учета сил трения в
уплотнениях гидроцилиндров, уравнения равновесия будут иметь вид
0
,
5
R
+
p
2
A
ш
−
p
1
A
п
= 0
(1)
— для гидроцилиндра ГЦ
1
;
0
,
5
R
+
p
4
A
ш
−
p
3
A
п
= 0
(2)
— для гидроцилиндра ГЦ
2
, где
A
п
= 0
,
785
d
2
п
и
A
ш
= 0
,
785(
d
2
п
−
d
2
ш
)
—
площади поршня в поршневой и штоковой полостях гидроцилиндров
соответственно;
d
п
— диаметр поршня;
d
ш
— диаметр штока.
Сопоставление равенств (1) и (2), с учетом соотношений
p
1
=
p
4
и
p
2
=
p
3
, определяет равновесное состояние гидроцилиндров после
окончания переходного процесса
p
1
(
A
п
+
A
ш
) =
p
2
(
A
п
+
A
ш
)
.
Следовательно, в условиях равновесия балки в полостях гидроцилинд-
ров установятся одинаковые давления
p
1
=
p
2
=
p
3
=
p
4
=
p
0
, где
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2014. № 6 75


