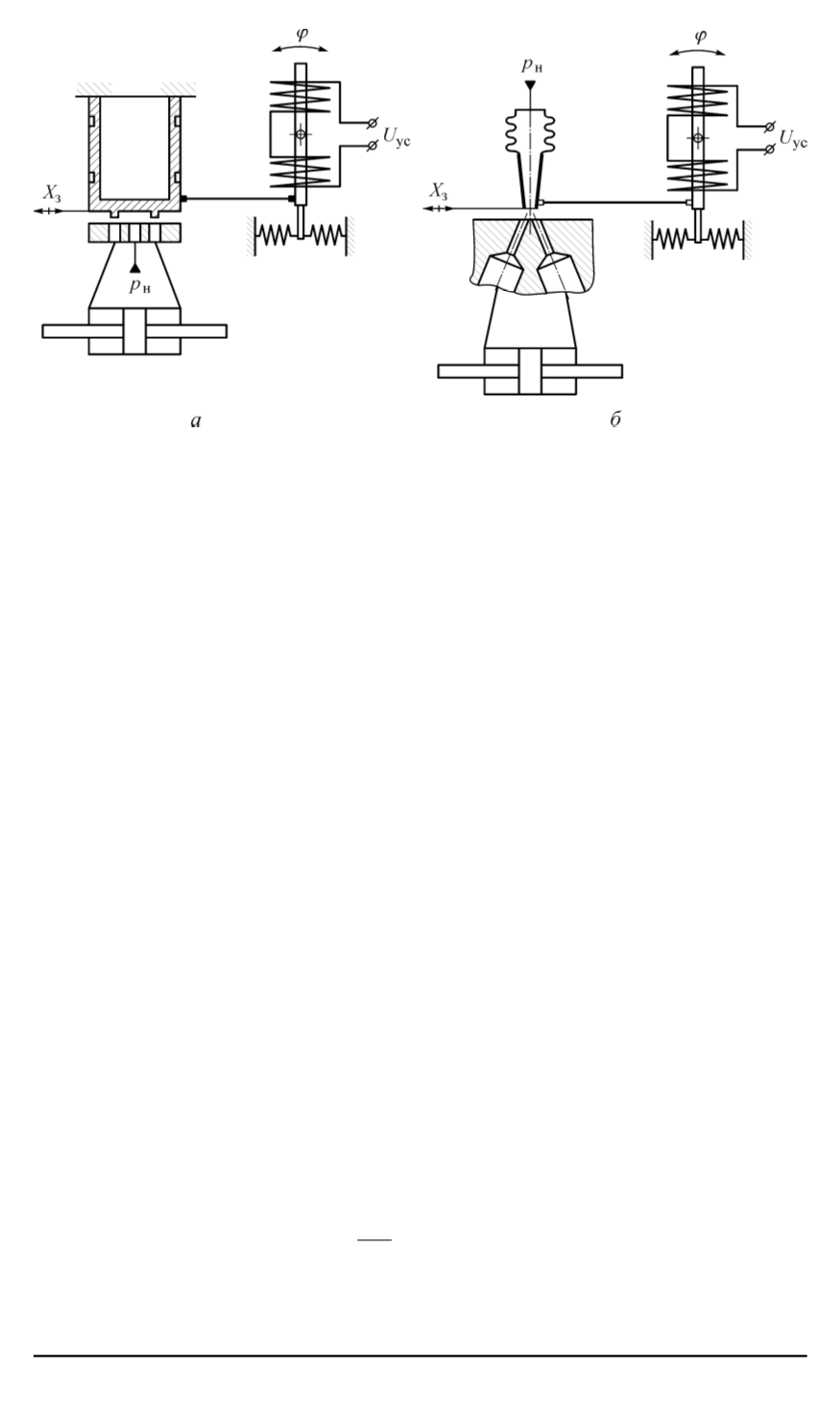
Рис. 2. Схемы гидроусилителей с плоским золотником (
а
) и со струйной труб-
кой (
б
)
9
ограничивают чрезмерное повышение давления в гидроцилиндре.
Устройства
3
и
8
образуют однокаскадный гидроусилитель. В каче-
стве альтернативных схем приведенного АЭГП могут быть схемы с
плоским золотником и со струйной трубкой (рис. 2). В этих случаях
используется двухшестеренный насос.
Математические модели.
Математическое описание АЭГП пока-
жем на примере схемы с золотниковыми плунжерами [3]. В основу ма-
тематического описания АЭГП положены линейные модели, которые
позволяют известными методами находить структуры и параметры,
обеспечивающие оптимальное управление приводом. Методика опти-
мального проектирования позволяет использовать и более сложные,
нелинейные математические модели.
Линейную математическую модель АЭГП можно представить сле-
дующими уравнениями.
Уравнение электрического сигнала ошибки
U
ε
=
U
вх
−
U
о.с
,
(1)
где
U
вх
=
f
(
t
)
— входной сигнал при управлении АЭГП.
Уравнение, описывающее изменение сигнала в электронном уси-
лителе (ЭУ),
U
ус
=
K
ус
U
ε
,
(2)
где
U
ус
— напряжение на выходе ЭУ;
K
ус
— коэффициент усиления ЭУ.
Уравнение напряжений в обмотках ЭМП
U
ус
=
L
обм
dI
у
dt
+ (
R
обм
+
R
вых
)
I
у
,
(3)
где
I
у
— ток управления;
R
обм
— сопротивление обмоток ЭМП;
R
вых
—
сопротивление выходного каскада ЭУ;
L
обм
— индуктивность ЭМП.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 4 33


